Перед налаштуванням PID у вас вже повинна бутити налаштована фільтрація.
З гайдом з налаштування фільтів у betaflight 4.6 ви можете ознайомитись за посиланням Налаштування-фільтрів-на-прикладі-speedybee-mario8
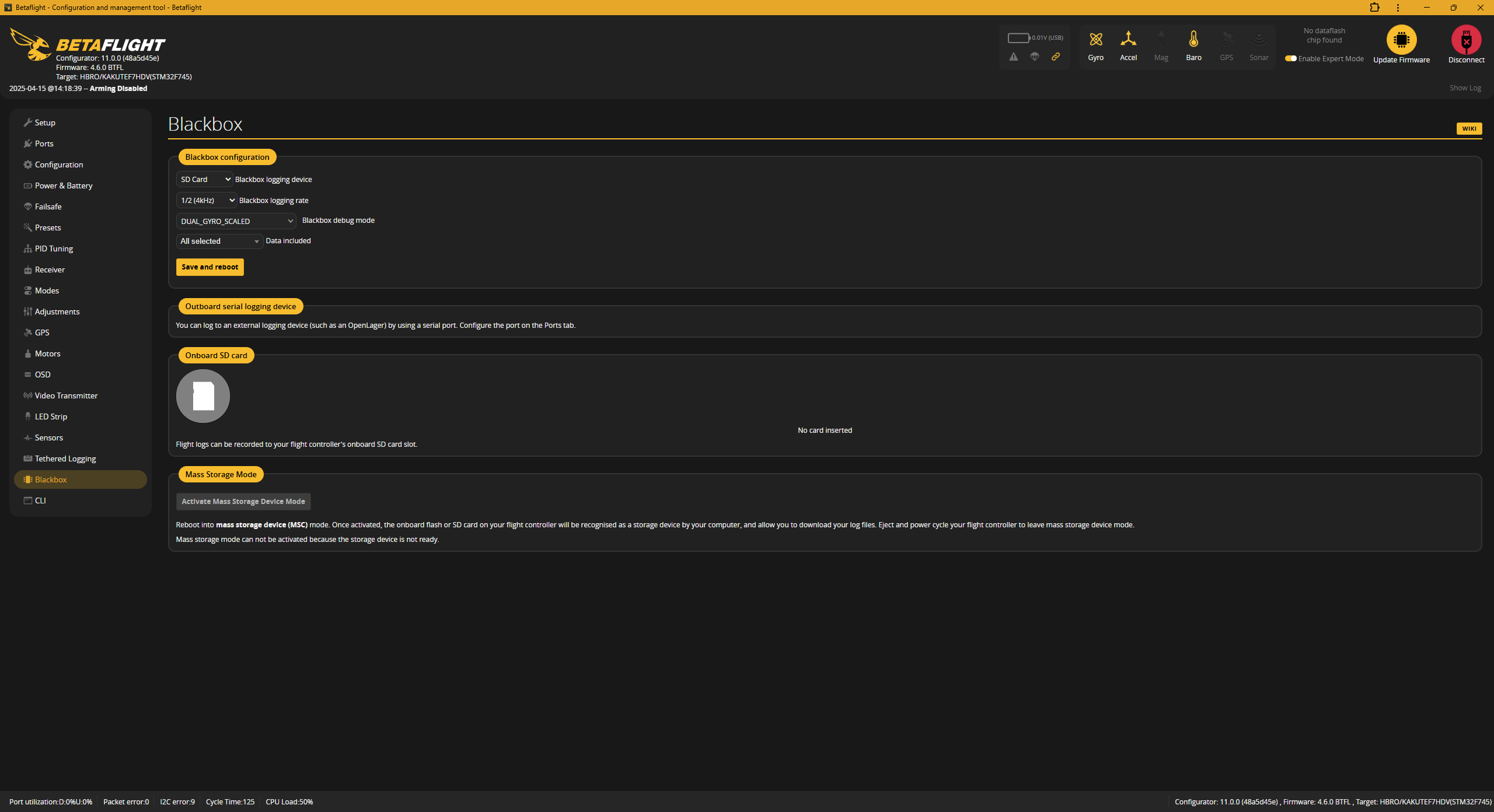
Крок 1 – Налаштувати BlackBox
В меню блекбокс встановити параметри “blackbox login rate” = 1/2 та вибрати режим Dual Gyro Scaled
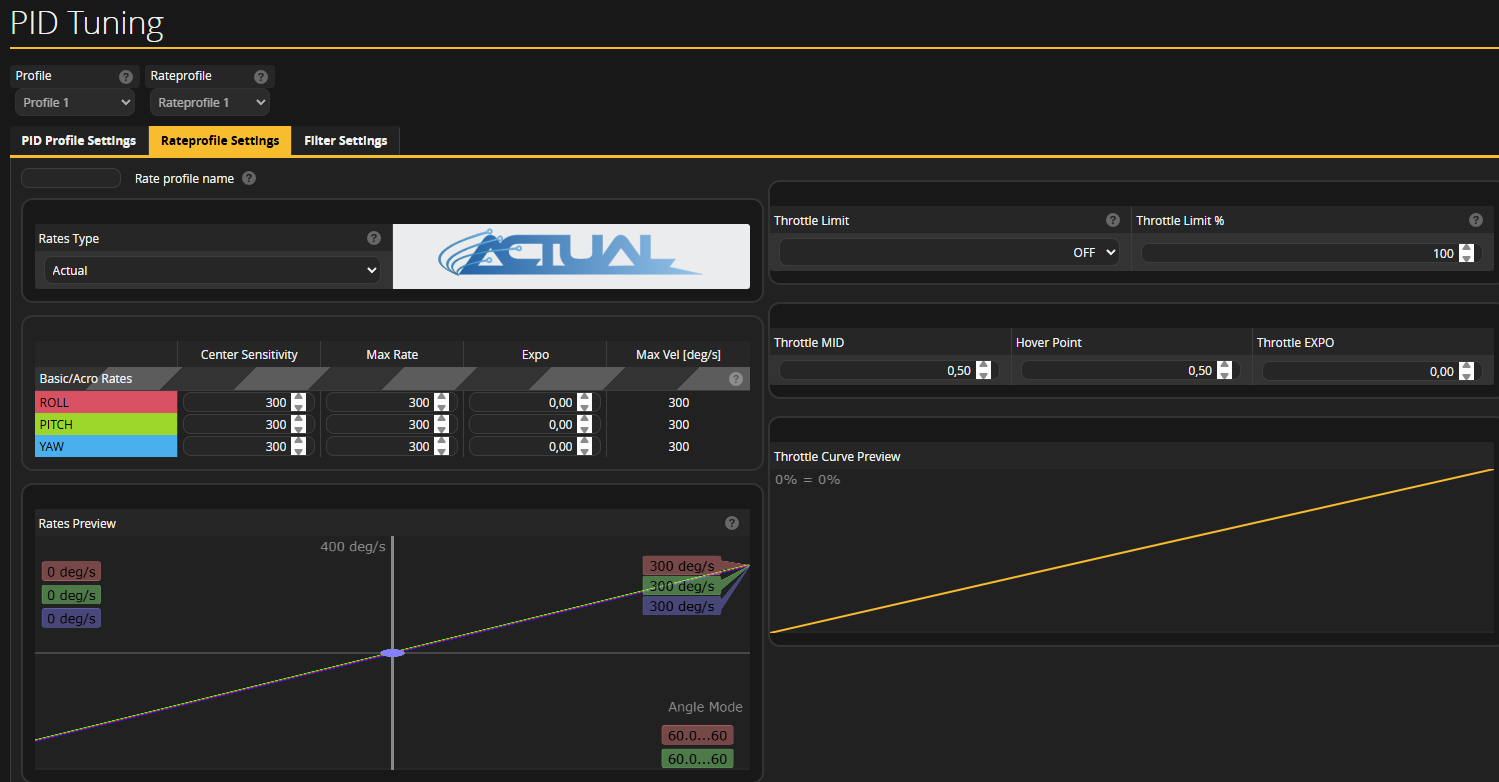
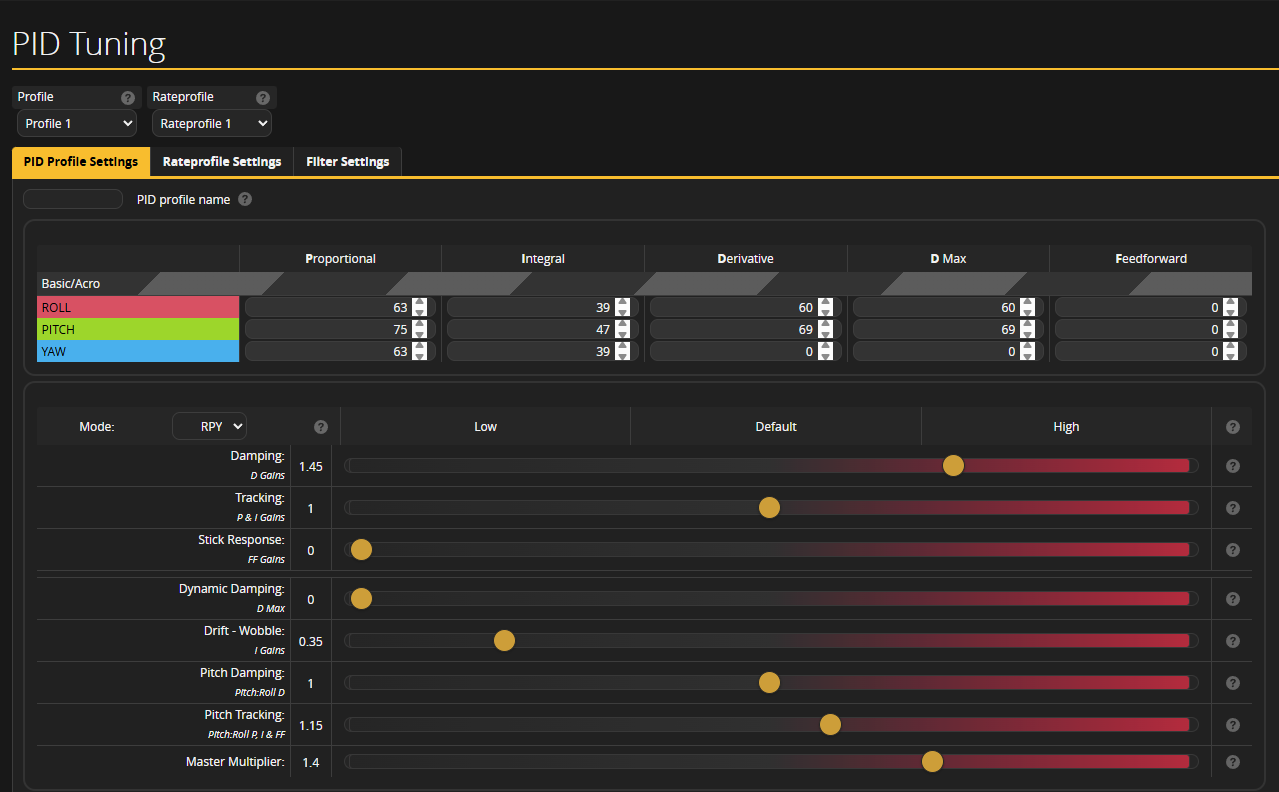
Крок 2 -Встановити налаштування PID як на фото

Крок 3 Виконуємо політ
Політ протягом 15-30 секунд з інтенсивними коливаннями по Pich та Roll
Для кожного нового польоту змінюємо значення повзунка, починаючи з 0,6 на 0,1
Необхідно зібрати данні з значеннями: 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,4 1,5
Увага! Для дронів розміром від 7 можна починати з 0,8

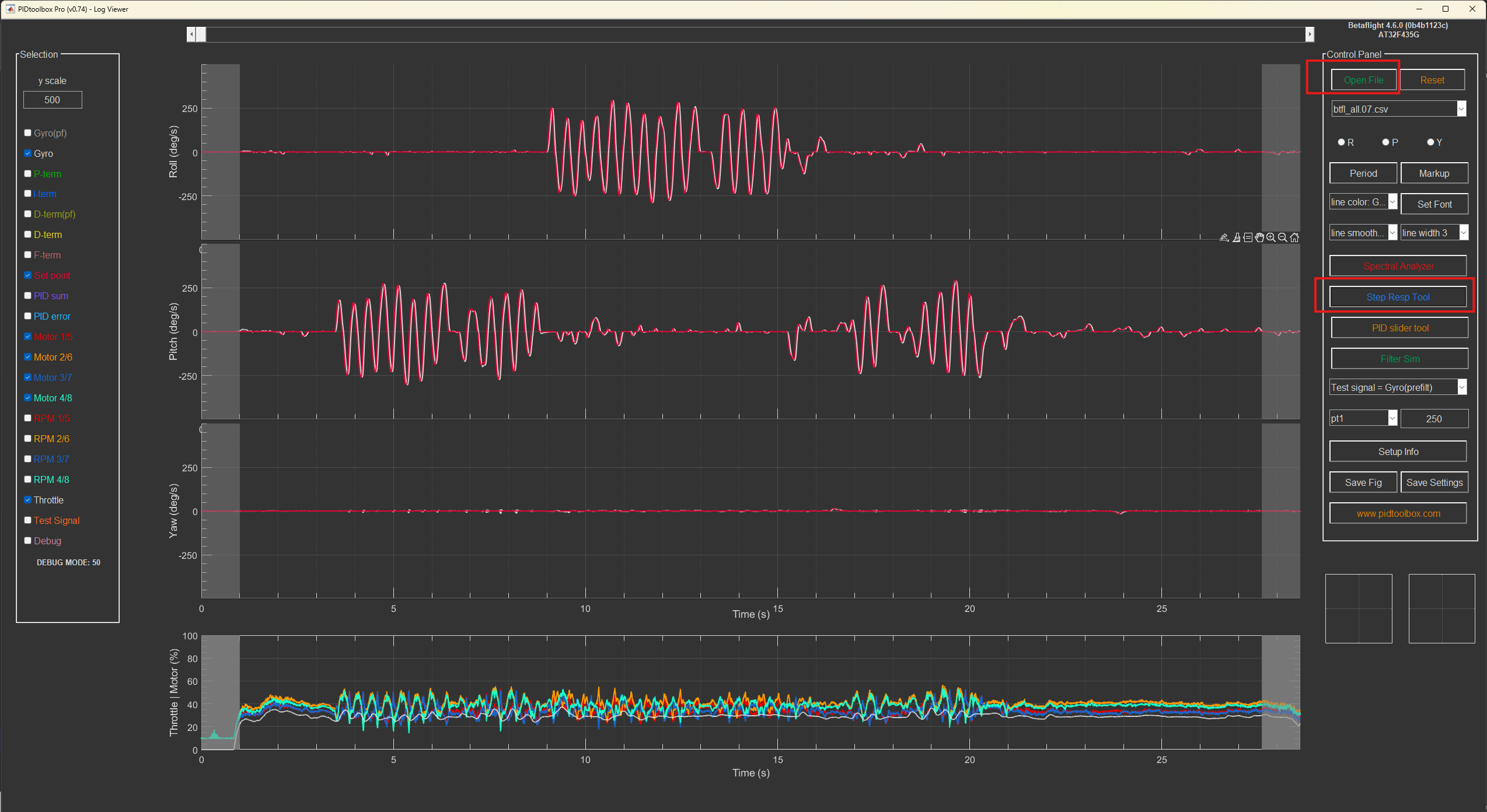
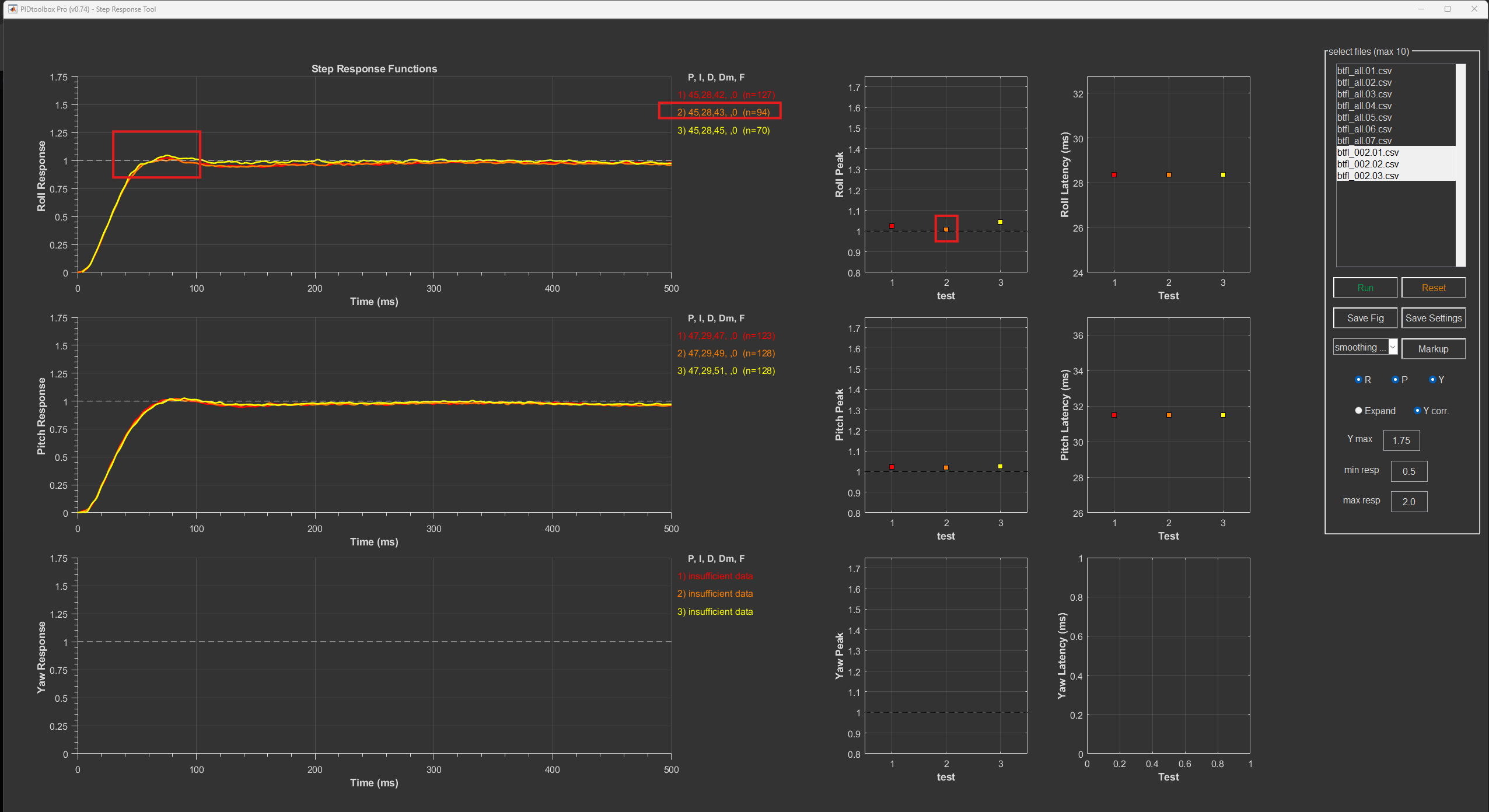
Виконуємо аналіз польотного логу у розділі StepRespTool
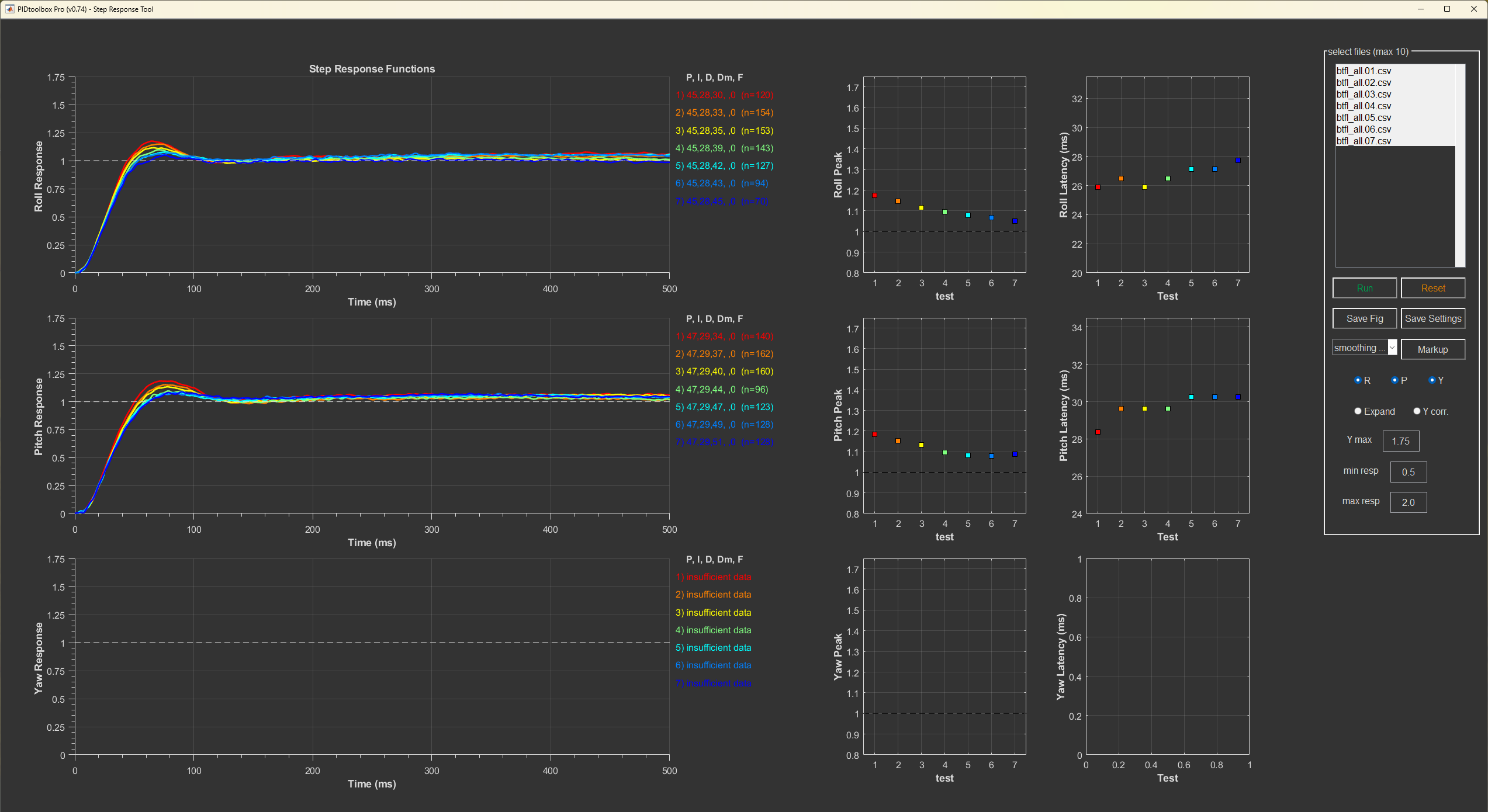
Обираємо той графік, що виходить максимально гарно на лінію “1” без перескоків та повільності
В нашому випадку це 2й графік. Виставляємо ці значення у BFL

4 Пошук значення MasterMultiplayes
За допомогою зміни положення повзунка рухаємось від 0,6 до 1,5 з кроком 1,0 або 0,5
Увага!!! після кожного тесту перевіряєм температуру моторів

Завантажуємо лог у програму PidToolBox та проводим аналіз.
Звертаємо увагу на сусідні значення, в яких зміни вже незначні та вибираємо меньший з них
В нашому прикладі при коєффіцієнті 1,4 та 1,45 ми маємо вже однакові значення
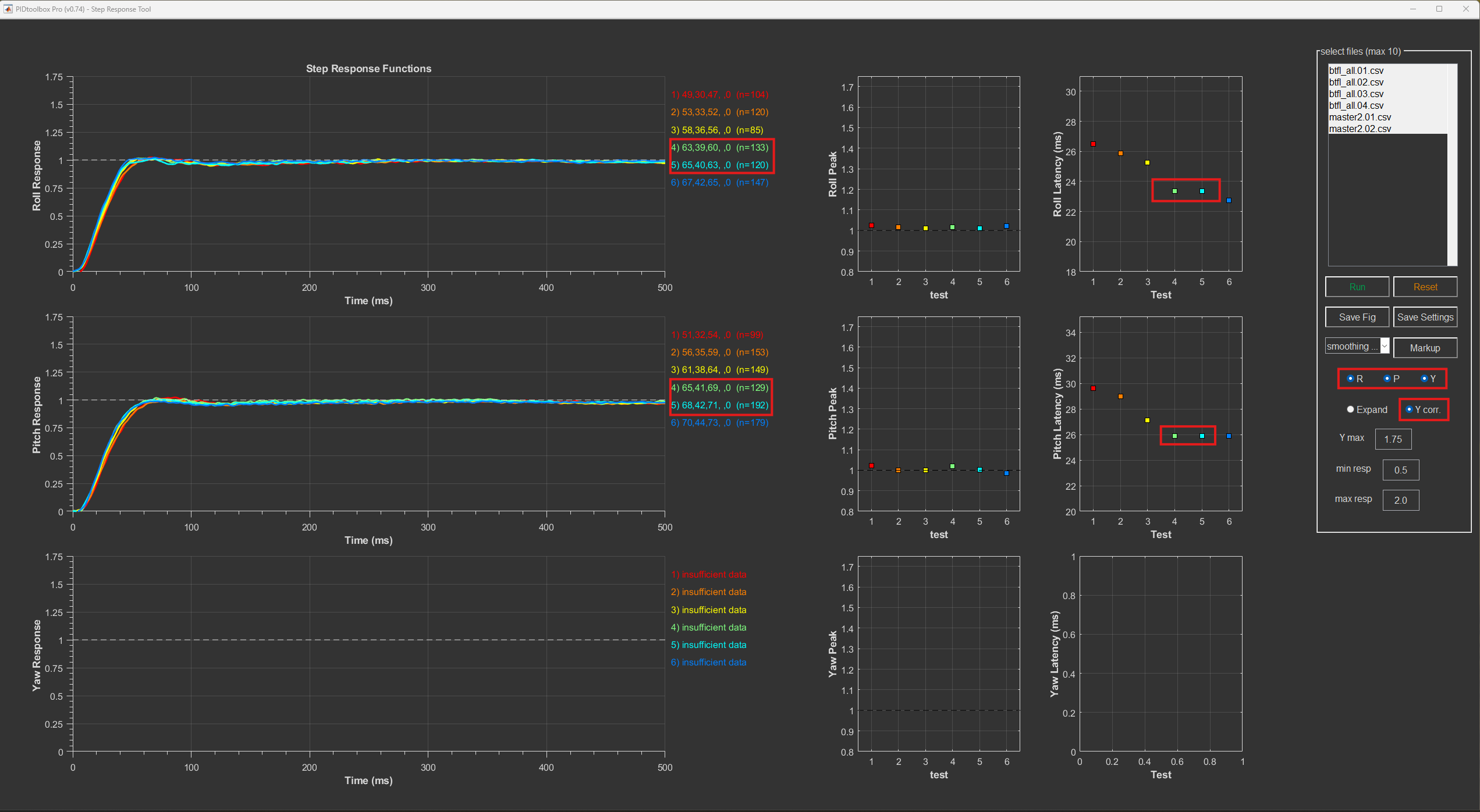
Також можна перевірити час затримкі фільтрів. Тут ми також бачимо, що затримка майже не змінюється

! Для дронів з додатковою вагою (більший акумулятор, додаткова камера GoPro, інша додаткова вага – рекомендовано обирати менше з значень при яких змін вже немає
Відповідно в нашому випадку оптимальне значення буде 1,4

Крок 5 Співвідношення Pitch/Roll
Чому це налаштування важливе: На великих дронах внаслідок великих акумів розподілення ваги є нерівномірним. В наслідок цього зазвичай Pitch відстає від Roll і його треба підсилити
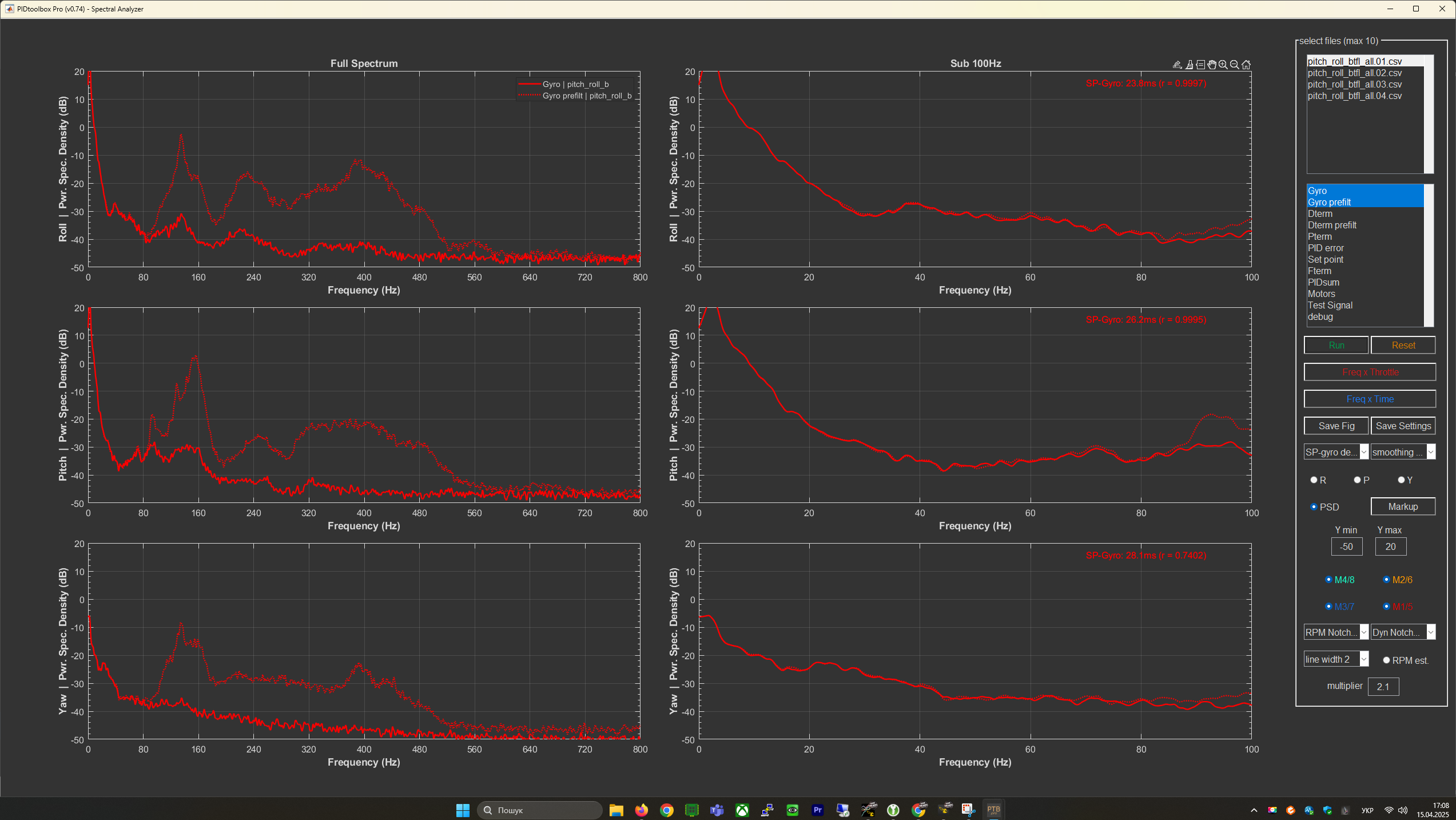
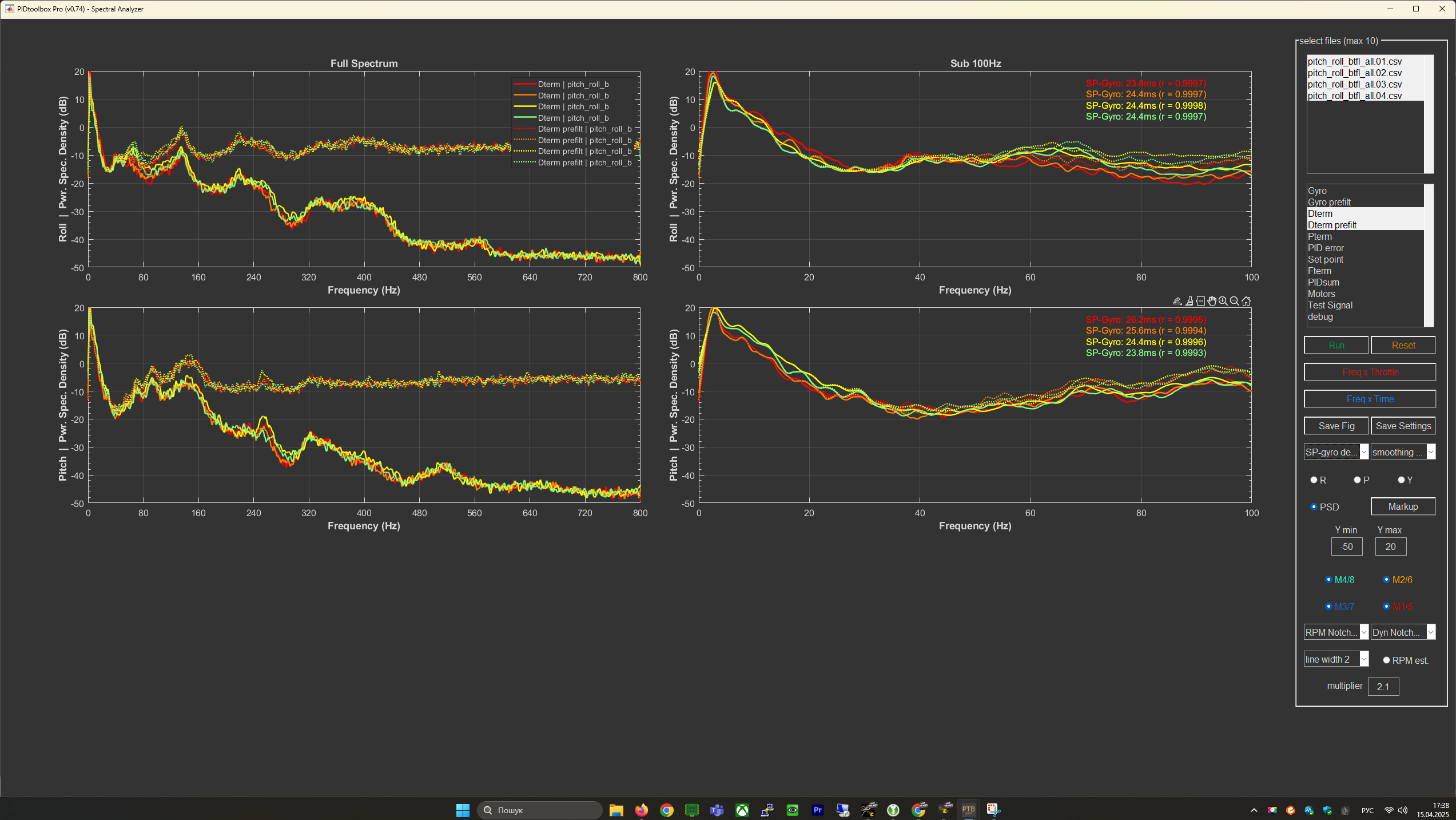
Наприклад на наступному графіку видно, що ROLL=23,8 ms PITCH=26.2 ms
Для відображення затримки включіть режим SP Gyro Delay під кнопкою SAVE Fig в інтерфейсі зліва
! Наша задача виконати коригування таким чином, щоб між ROLL/PITCH не перевищувало 1,5 ms
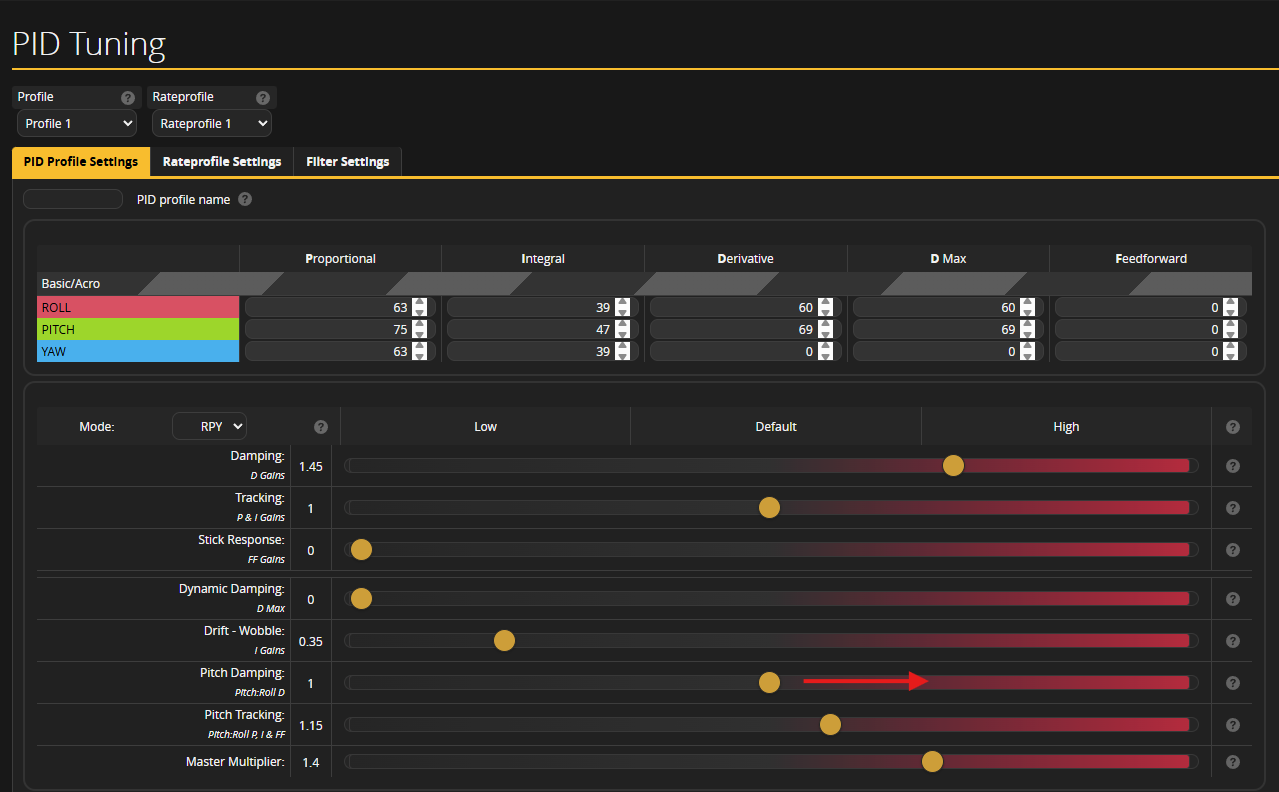
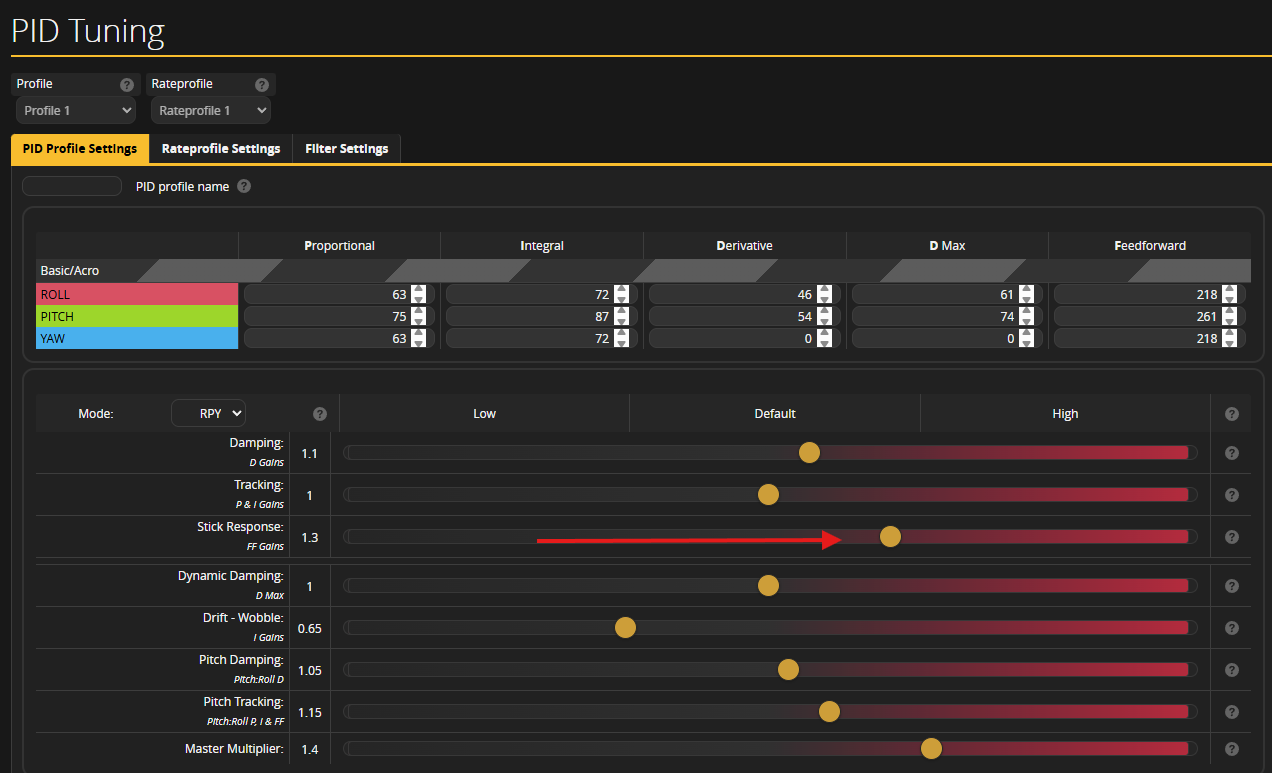
Використовуючи повзунки Pitch Dumping для збільшення параметру “Р” та Pitch Tracking для коригування параметру “D” ми можемо скорегувати P/D для Pitch окремо від Roll
Першим кроком спочатку ми поступово збільшуємо P за допомогою повзунка Pitch Dumping з кроком 0,5., другим кроком корегуємо параметр D за допомогою повзунка Pitch Tracking
На графіку нижче наведено декілька прикладів, де видно зміну значень параметру P і відповідну затримку між PITCH та ROLL
При цьому ми бачим, що з зменшенням з збільшенням параметру P по PiTCH нам потрібно буде наступним кроком корегувати D по PITCH, бо в нас з’явився бугор по осі PITCN
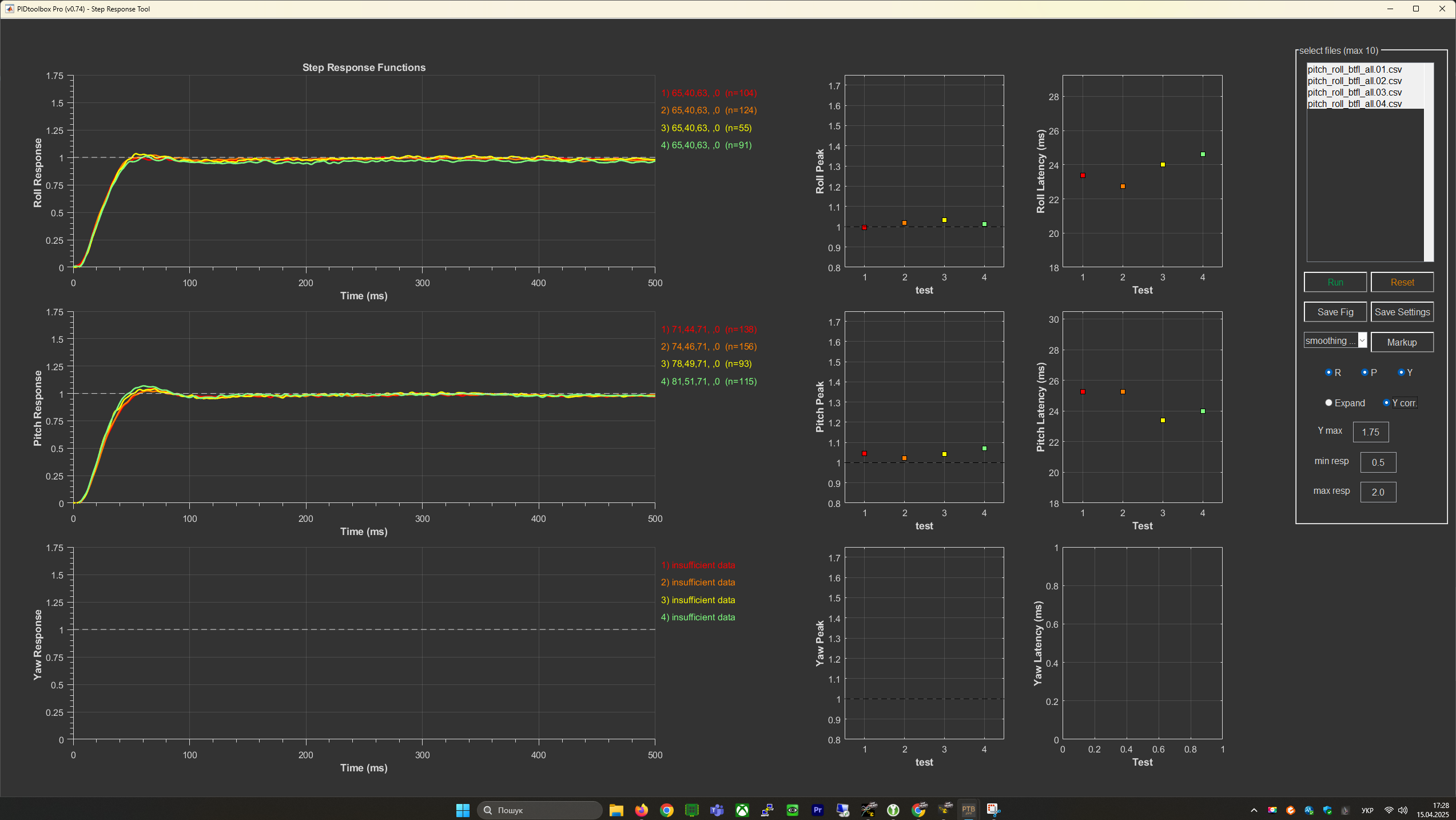
Також перевіряємо час відклику і бачим шо для 3го графіка від вже співпадає і дорівнює 24,4 ms а для четвертого вже починає обганяти ROLL
Зупиняємось на значенні 75/47/69
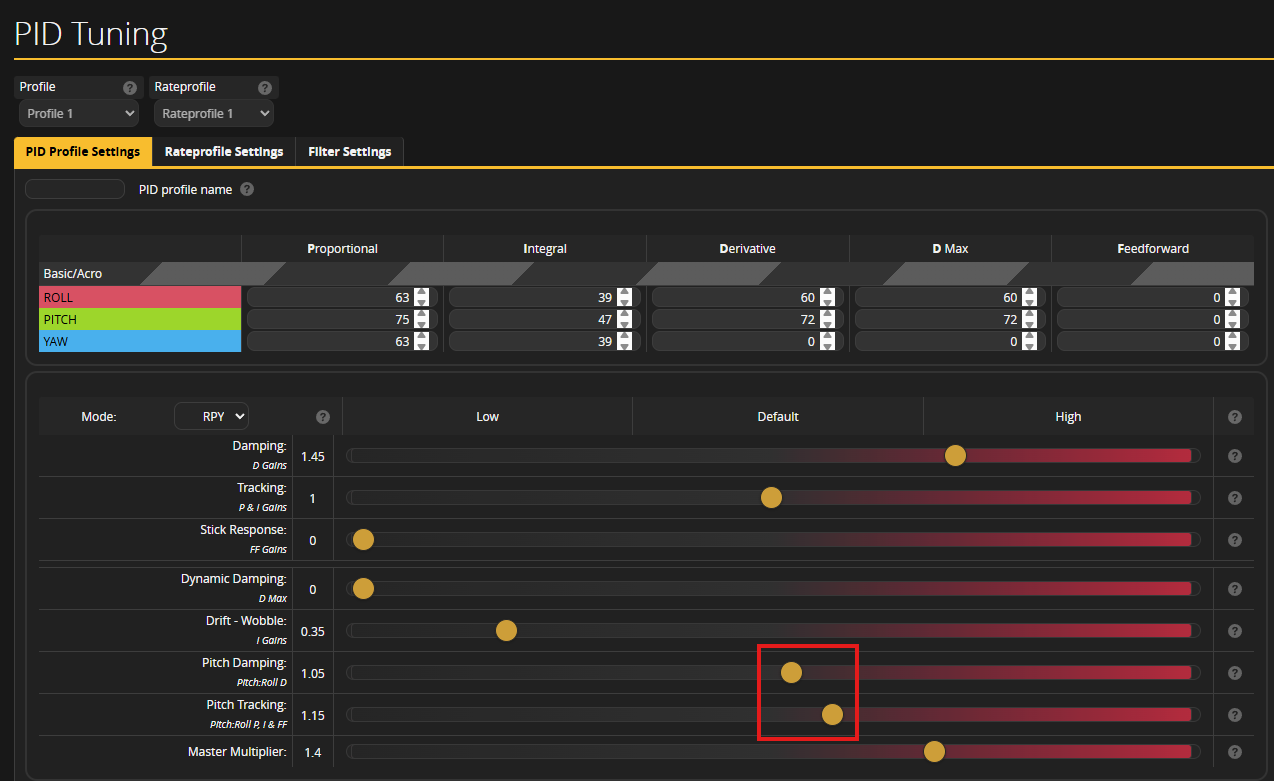
Крок 6 Корегування параметру D для PITCH після попередніх змін
За допомогою повзунка PitchDamping виконуємо коригування співвідношення P\D для PITC
Виконуймо перевірку графіка по PITCH поступово рухаючи повзунок PitchDamping з кроком 0,5
Нажаль LOG був втрачений, але вірне значення вийшло при коефіцієнті 1,05
Крок 7 D-Max
D-max дозволяє зменшити D-фільтрацію, залишивши параметри P та I на незмінному рівні. Цекорисно в випадку коли ви маєте важкий квад та рухаєтесь по прямій
В випадку різкого маневру параметр D буде автоматично збільшуватись до визначеного в попередніх кроках значення
1-запам’ятовуємо те значення, яке ми підібрали в наслідок нашого налаштування (60 roll, 72 pitch)

2-ставимо повзунок D-max в значення 1, при цьому Delerative не змінеться, а D-max збільшеться

3-зменьшуемо повзунок D-Gains щоб повернути в D-max наші занчення (+/- 2 не критично)
Було (60 roll, 72 pitch) стало (61 roll, 74 pitch)

Крок 8 – Повертаємо I
Для 7-10 дюймів з додатковою вагою значення I = 0.65

Крок 9 – FeedForward
Повертаємо наші звичайні рейти
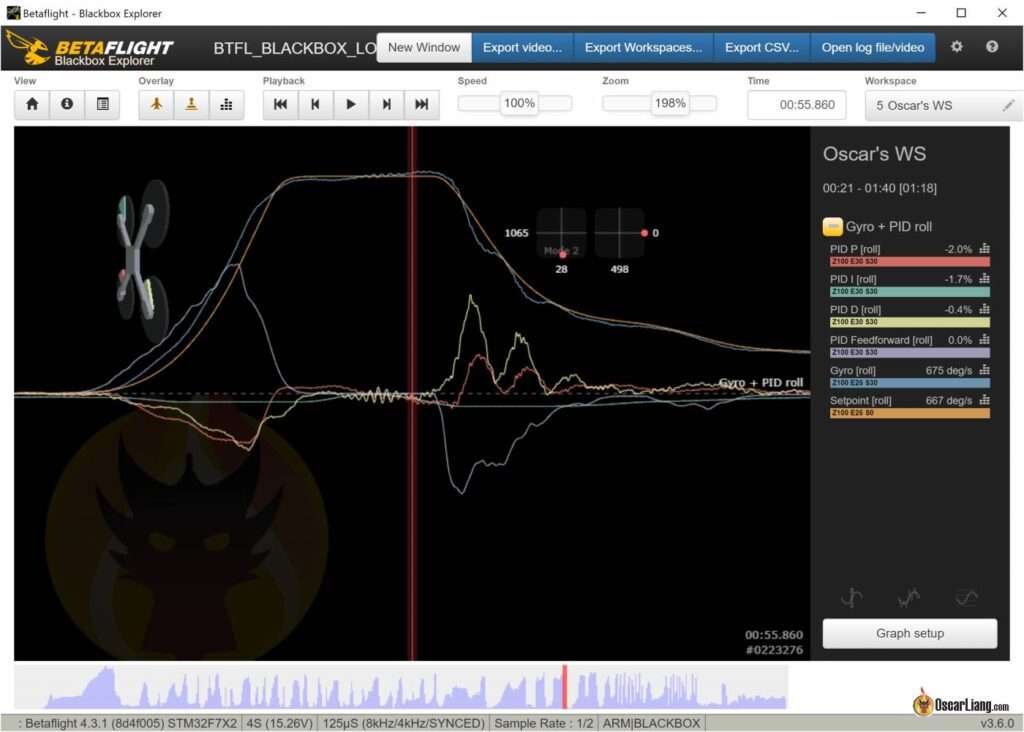
Виконуємо тестовий політ (без ваги) з повними обертаннями по ROLL/PITCH та завантажуймо лог у програму Blackbox Explorer
Активуємо налаштування аналізу
Якщо Feed Forward перевищує (гіроскоп рухається раніше встановленого значення), FF занадто високий. У наступній демонстрації 0,5 є занадто низьким, 1,0 все ще недостатньо високим, але 1,5 є трішки забагато та перевищує значення. Я думаю, що Feedforward на 1.3-1.4 повинен зробити це в цьому прикладі.
Якщо посилення FF занадто високе, це може спричинити реакцію P-члена в протилежному напрямку, намагаючись протидіяти цьому.
Немає значення, яким є ваш стиль польоту, упередження може бути корисним і не застосовується лише до певних типів польоту. Навіть кінематографічний політ може виграти від достатньої кількості прямої подачі, якщо ви рухаєте палицею плавно та повільно, тоді попередня подача все одно не спрацює. Якщо вам потрібна миттєва відповідь, FF зменшить затримку між введенням джойстика та квада. Якщо вам потрібен плавний політ, просто використовуйте експо, більше згладжування RC або знизите швидкість.
Є додаткове налаштування Feedforward boost (FF Boost). Ви хочете збільшити його, якщо гіроскоп відстає від заданого значення на початку руху, але наздоганяє його пізніше. Але ви повинні зменшити його, якщо гіроскоп випереджає встановлене значення на початку руху, але відстає пізніше.
Відповідно встановлюємо FF = 1.3
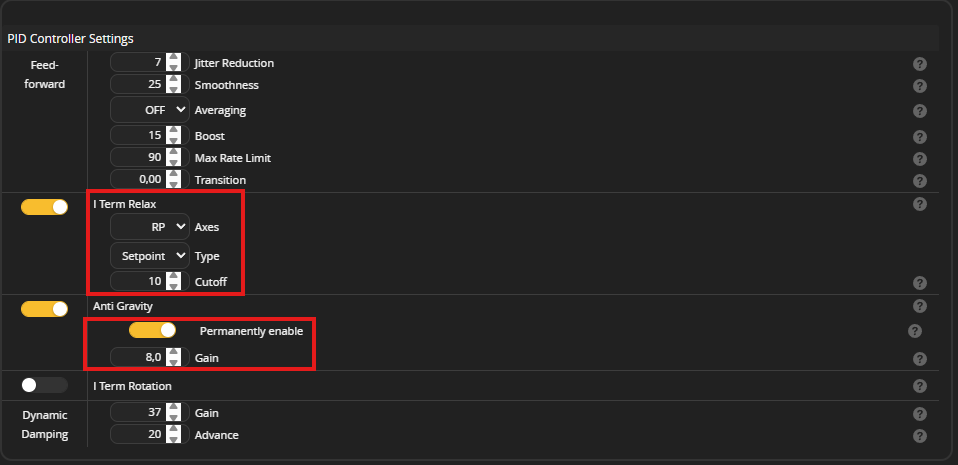
Крок 10 – Повертаємо AntiGravity та I-Gains
Для великих квадів рекомендовано як на скріні
I term relax = 10
AntiGravity = 8
Фінальні налаштування виглядають наступним чином


{kind=link}
{kind=link}