У цьому підручнику я розповім, як я використовую журнали Blackbox для налаштування фільтрів і PID на дроні Betaflight FPV. Я буду використовувати PIDToolBox як основний інструмент для налаштування фільтрів і PID, а Blackbox Explorer – як допоміжний інструмент для Feedforward і загального усунення несправностей.
Відмова від відповідальності: цей посібник призначено лише для інформаційних цілей. Автор не несе відповідальності за збитки, спричинені діями читачів.
Blackbox не є обов’язковим для налаштування, як пояснюється в цьому посібнику , але він дає повне уявлення про те, що відбувається з безпілотником, і дозволяє повністю розкрити його потенціал. Такі речі, як фільтрація шумів і крихітні викиди, видно лише в Blackbox. Якщо ви перфекціоніст або просто людина, яка любить майструвати, це підручник для вас.
- Зміст
- Початок роботи
- Налаштування цілей
- Базові конфігурації
- Як користуватися PIDToolBox і Blackbox Explorer?
- Налаштування фільтрів
- Виконання польоту для аналізу шуму
- Пояснення частоти шуму гіроскопа
- Затримка через фільтрацію
- Стратегія фільтра
- Наскільки чиста ваша будівля?
- Налаштування фільтра RPM
- Налаштування динамічного режекторного фільтра
- Налаштування фільтра нижніх частот гіроскопа
- Налаштування D Term Lowpass
- Gyro/D Term Notch Filters
- Фільтр низьких частот Yaw
- Налаштування PID
- Профіль оцінки та кутовий режим
- Знаходження P/D балансу
- Знаходження максимального посилення D
- Налаштування подачі вперед
- Налаштування I Gain
- Динамічне демпфування
- Інші налаштування
- Антигравітаційні прирости
- Дроссельна заслінка
- Компенсація падіння напруги
- Лінеаризація тяги
- TPA
- I Термін Ротація та абсолютний контроль
- Тюнінг Yaw
- Не існує ідеальної мелодії
- Поради щодо усунення несправностей
Початок роботи
Налаштування цілей
Використовуючи Blackbox для налаштування нашого дрона FPV, ми прагнемо досягти двох основних цілей:
- Більш ефективне використання фільтрів: Використовуйте мінімальну фільтрацію, щоб мінімізувати затримку, але достатню, щоб утримувати шум на прийнятному рівні.
- Оптимізовані коефіцієнти PID і відповідні налаштування: переконайтеся, що дрон літає точно та чуйно.
Базові конфігурації
0. Контрольний список обладнання
- Блок контролера польоту (FC): виберіть блок FC з гумовими прокладками (жуйками) для довговічності та шуму.
- Металеві гвинти: використовуйте металеві гвинти для стека FC; уникайте нейлонових/пластикових гвинтів/стойки, оскільки вони схильні до поломки та вібрації. Якщо потрібні розпірки, використовуйте м’які силіконові. Легші титанові гвинти можуть заощадити кілька грамів.
- Стокові гвинти фіксації: надійно закріпіть стекові гвинти металевою гайкою перед встановленням 4в1 ESC. Якщо ваша рама має запресовані гайки, додаткові гайки не потрібні. Спочатку затягніть гвинти вручну, а потім остаточно стисніть гайковим ключем/викруткою.

{kind=link}
Використовуйте 4 пластикові гайки, щоб закріпити стек FC. Затягніть гайки лише вручну, щоб уникнути надмірного розчавлення гумок, дозволяючи м’якому кріпленню працювати ефективно.

{kind=link}
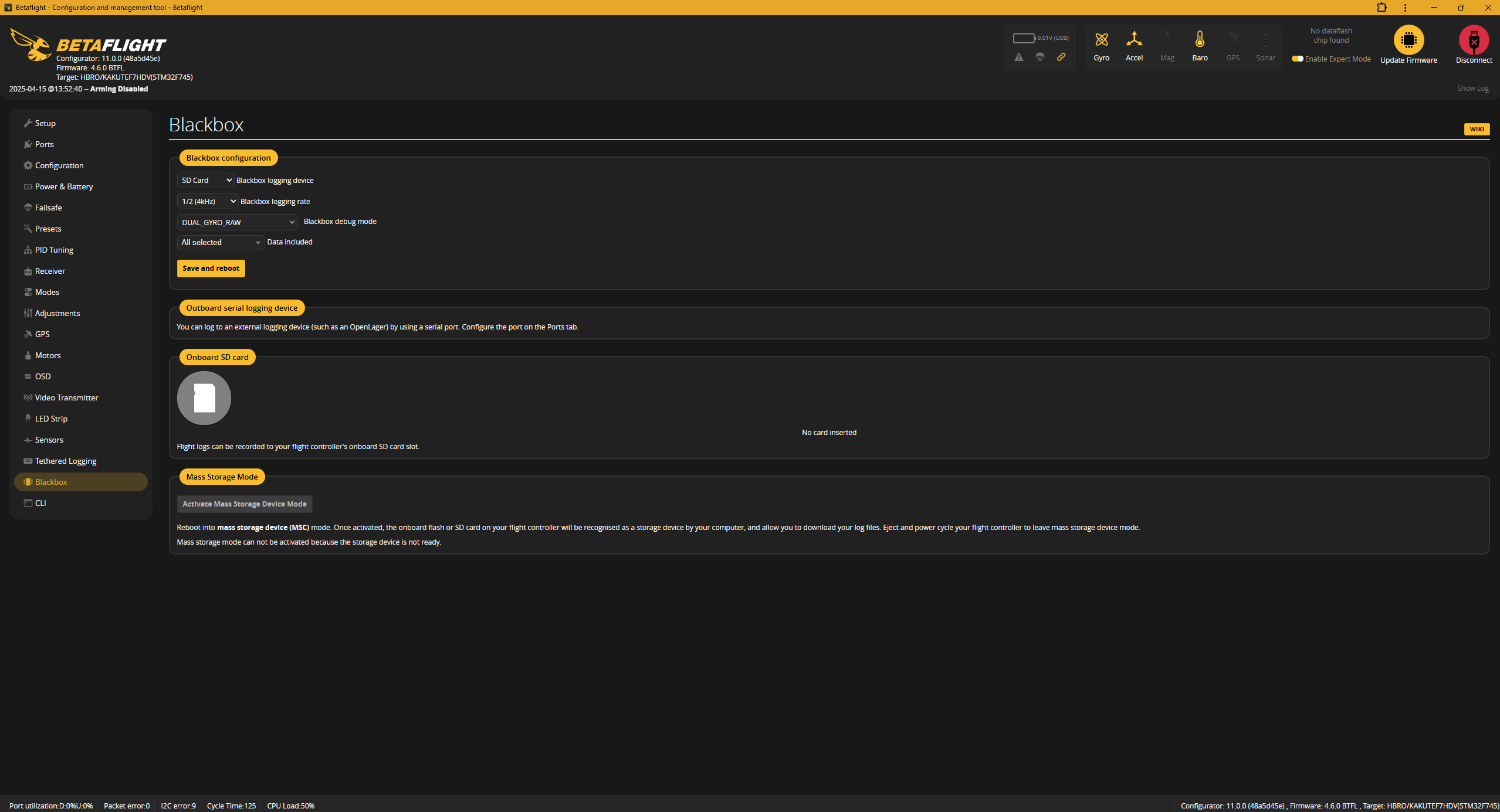
1. Налаштування запису Blackbox
Виберіть такі параметри в конфігурації Blackbox:
- Пристрій реєстрації: вбудована флеш-пам’ять або SD-карта
- Швидкість реєстрації: 2 кГц (або 1,6 кГц для гіроскопа BMI270)
- Режим налагодження: GYRO_SCALED (записує нефільтрований сигнал гіроскопа)
- Включені дані: щоб заощадити місце для більш довгих записів, зніміть прапорці непотрібних даних, таких як висота, GPS і магнітометр, або залиште значення за замовчуванням.
{kind=link}
2. Вимкніть фільтр ADC у радіостанції OpenTX/EdgeTX (Система -> Обладнання), щоб зменшити затримку.

{kind=link}
3. Налаштування ESC :
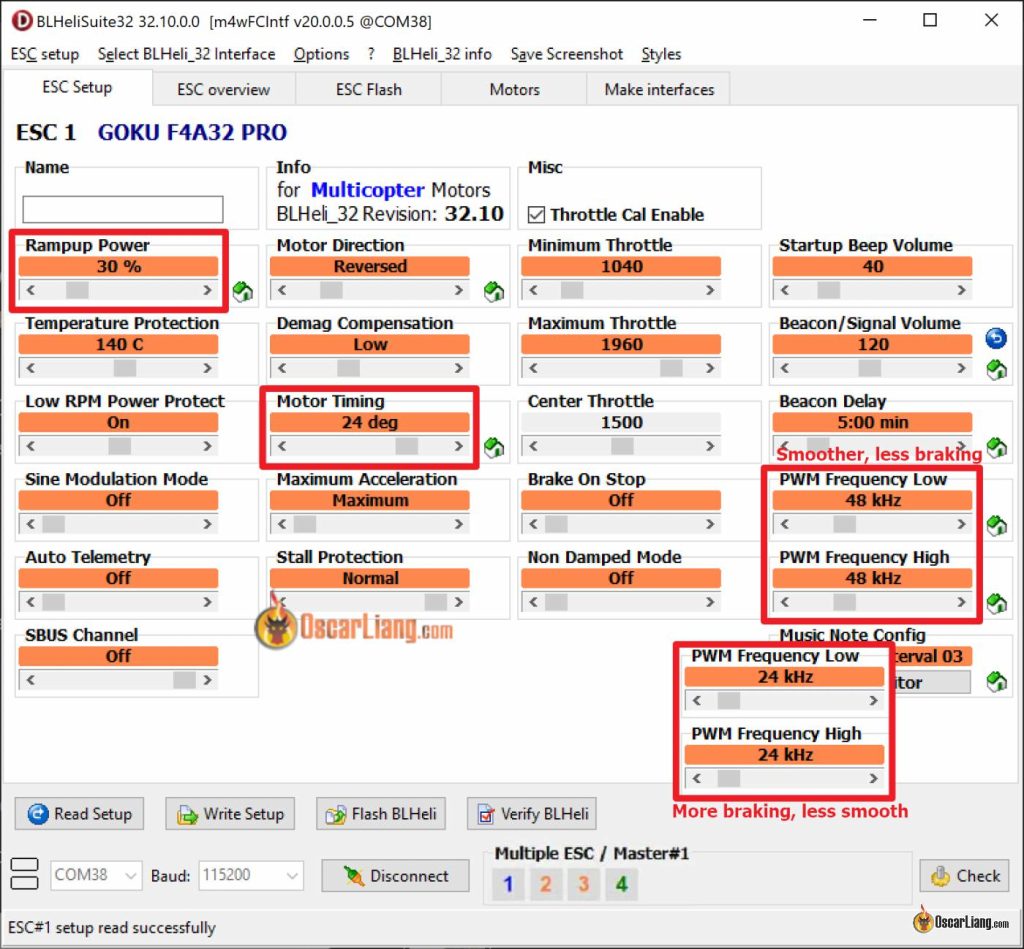
У мене є допис із поясненнями найкращих налаштувань BLHeli32 . Ось підсумок (для 5-дюймових дронів):
Для BLHeli_32 ESC:
- Потужність наростання: 30%
- Час двигуна: 24
- Частота ШІМ: встановіть LOW і HIGH на фіксовані 24 кГц або 48 кГц. Частота 48 кГц, як правило, безпечніша для шуму гіроскопа, що робить ваш квадроцикл плавнішим і легшим для налаштування. 24 кГц забезпечує кращу потужність гальмування, що є корисним для керування та чутливості реквізиту, але з вищим ризиком вібрації. Якщо ви на огорожі, просто виберіть 48 кГц.
{kind=link}
Для BLHeli_S ESC спалахніть Bluejay, щоб увімкнути двонаправлений DShot, необхідний для RPM-фільтра та Dynamic Idle. У мене є посібник щодо того, як прошити його тут: https://oscarliang.com/bluejay-blheli-s/
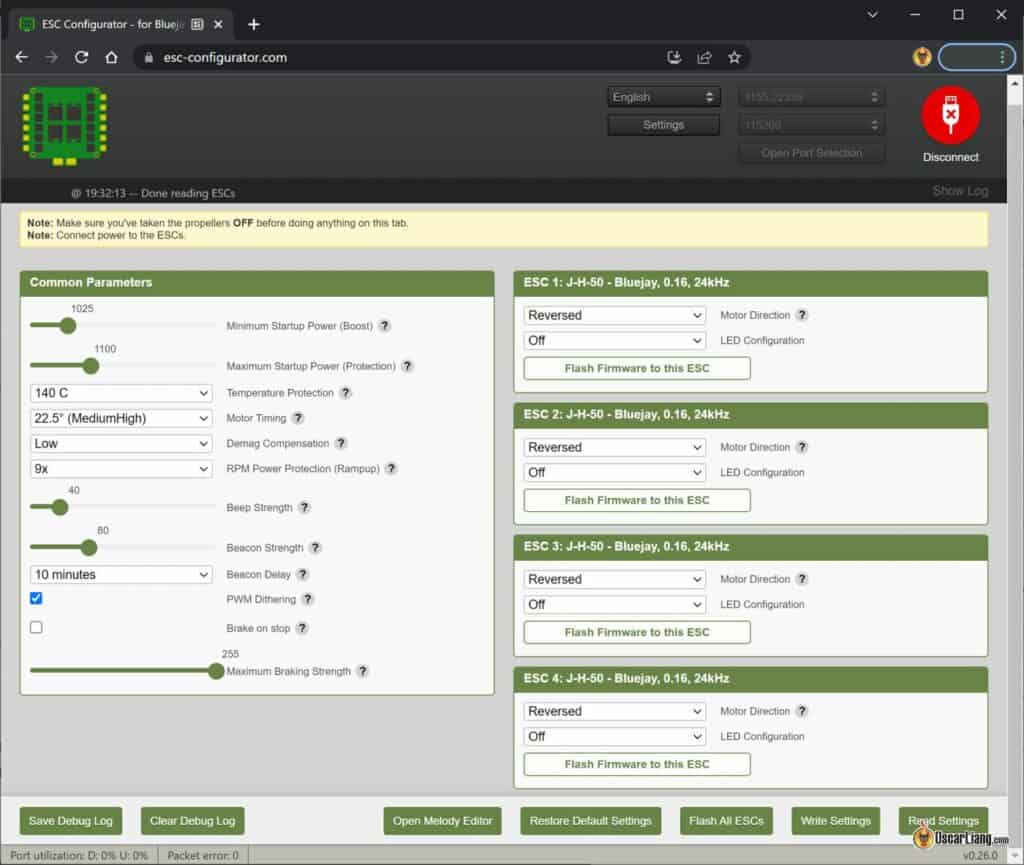
{kind=link}
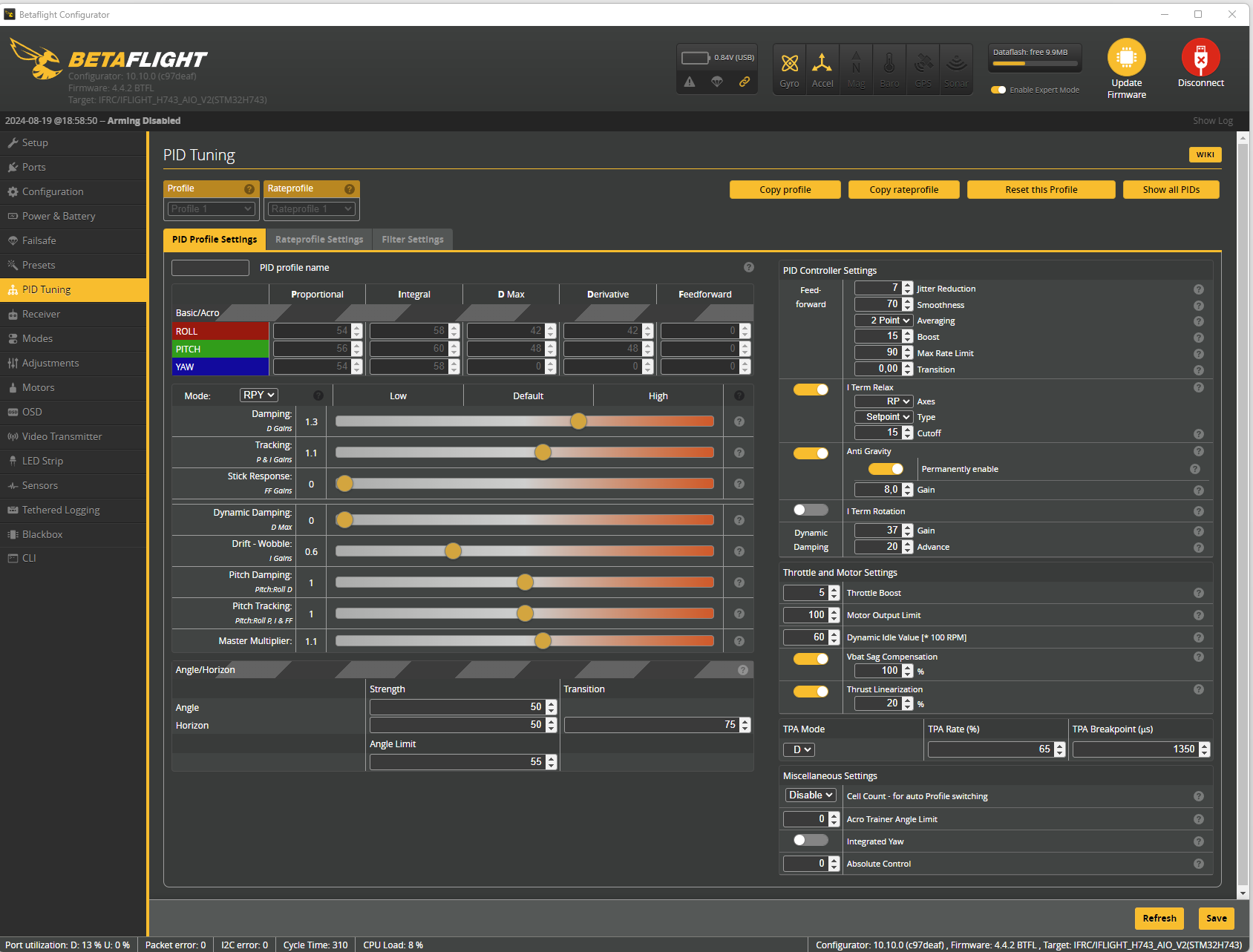
3. Завантажте останню версію мікропрограми Betaflight на контролер польоту та залиште налаштування PID/фільтра за замовчуванням. Увімкніть експертний режим у конфігураторі Betaflight, щоб отримати доступ до всіх повзунків і параметрів на сторінці налаштування PID.

{kind=link}
На вкладці «Конфігурація» встановіть частоту контуру ПІД, а на вкладці «Двигун» — протокол ESC:
- DShot300 для циклічної частоти 4 кГц або 3,2 кГц
- DShot600 для циклічної частоти 8 кГц
4. На вкладці Motors увімкніть Bi-directional DShot .
Більшість сучасних ESC підтримують двонаправлений DShot. У мене є підручник про те, як увімкнути RPM filter . Для BLHeli_32 ESC він працює з коробки, але якщо у вас є BLHeli_S ESC, вам потрібно спершу спалахнути прошивку Bluejay (підручник) .
Перевірте, чи він працює належним чином, запустивши двигуни на вкладці «Двигуни» (без пропелерів) і переконавшись, що частота помилок (E) залишається на рівні 0%. Якщо ні, спробуйте повільніший протокол DShot, наприклад DShot300 або DShot150. Якщо помилки не зникнуть, можливо, вам доведеться просто відмовитися від двонаправленого DShot і RPM-фільтра.
Після ввімкнення перейдіть на вкладку PID tuning, Filter Settings, де ви можете ввімкнути фільтр Gyro RPM, один із найкращих фільтрів у Betaflight.

{kind=link}
5. Завантажте відповідний пресет RC_Link .
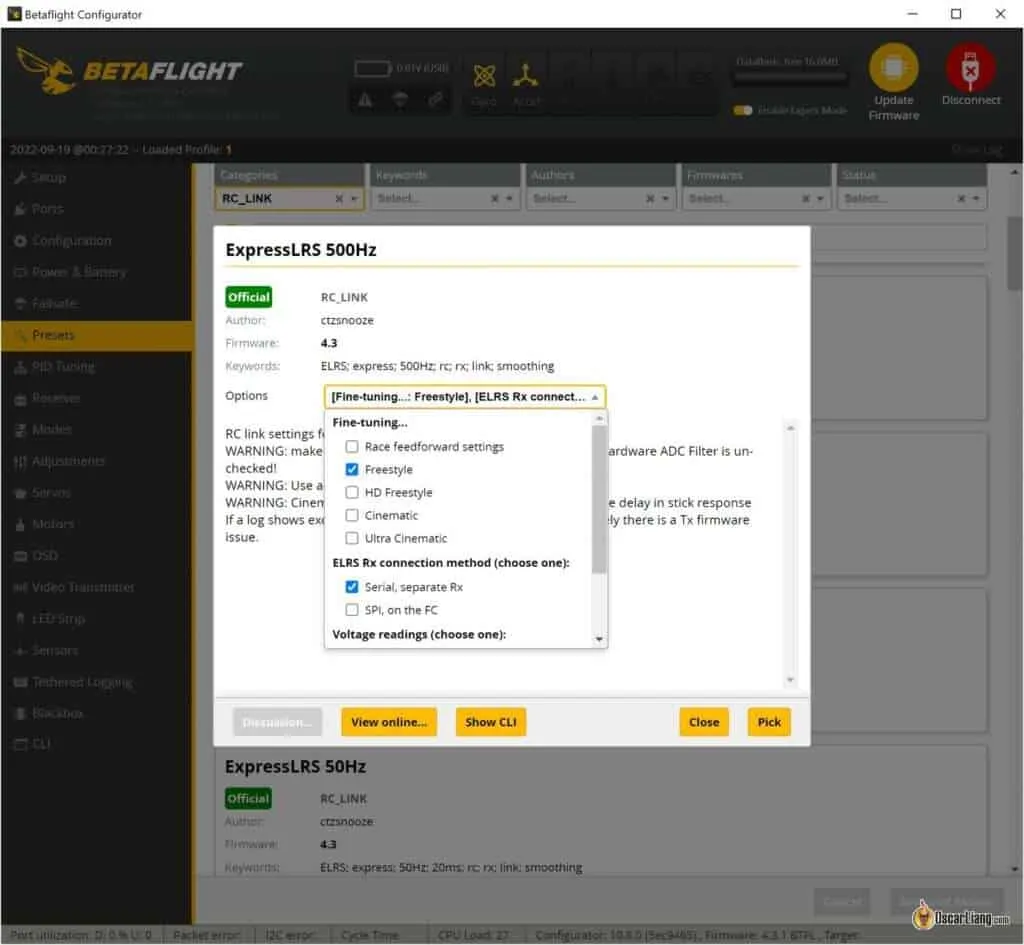
{kind=link}
Різні канали зв’язку RC вимагають спеціального згладжування RC і конфігурацій прямого зв’язку. Неправильна конфігурація може спричинити заїкання та вібрацію. Мій улюблений зв’язок із дистанційним керуванням – ExpressLRS, перевірте, яке радіопристрої я використовую тут .
Завантаження відповідного стилю RC_Link у Betaflight автоматично застосує необхідні конфігурації. Не забувайте вибирати варіанти залежно від вашого стилю польоту, для більшості людей це буде Фрістайл.
Для Crossfire зафіксуйте швидкість передачі пакетів до 50 Гц (більший діапазон, більша затримка) або 150 Гц (менша затримка, менший діапазон) за допомогою сценарію LUA TBS Agent Lite.
6. Нижній TPA
На вкладці налаштування PID встановіть точку переривання TPA від 1350 до 1750, щоб уникнути проблем з маскуванням коливань TPA на низькому/середньому газі під час налаштування. Тонко налаштуйте TPA наприкінці, якщо виникають проблеми з коливаннями на високому газі, але загалом я б мінімізував використання TPA, коли це можливо.

{kind=link}
Як користуватися PIDToolBox і Blackbox Explorer?
Я буду використовувати як PIDToolBox (PTB) , так і Blackbox Explorer (BE) для налаштування PID і фільтрів.
- Я вже говорив про те, як використовувати BE тут: « основи використання Blackbox у Betaflight »
- Завантажте та встановіть PTB тут: https://github.com/bw1129/PIDtoolbox/releases/latest/
- На цій сторінці пояснюється, як використовувати PTB: https://github.com/bw1129/PIDtoolbox/wiki/PIDtoolbox-user-guide
PIDToolBox буде нашим основним інструментом, це, безумовно, найпотужніший інструмент Blackbox. Це дозволяє порівнювати кілька журналів пліч-о-пліч, що полегшує перегляд наслідків змін фільтра. Інструмент Step Response особливо корисний для налаштування PID. Спектральний аналізатор у PTB використовує децибели на осі Y, забезпечуючи більш точні та об’єктивні порівняння. PTB також оцінює затримки фільтра, що дуже корисно.
Однак PTB може бути повільнішим і менш інтуїтивно зрозумілим у використанні порівняно з Blackbox Explorer. Для швидкої перевірки або усунення несправностей одного журналу BE швидше та легше. Але для налаштування шуму та фільтрів найкраще використовувати PTB.
Налаштування фільтрів
Ви можете знайти всі фільтри в Betaflight на вкладці PID Tuning. Нехай вас не лякають усі налаштування, у цьому підручнику ми здебільшого зосереджуватимемося лише на зелених секціях (фільтр RPM і динамічний режектор) і регулюємо помаранчеві секції (гіроскоп і D Term Lowpass Filters) за допомогою повзунків. Не потрібно чіпати червоні ділянки.
Додаткова інформація: дізнайтеся про різні типи фільтрів у Betaflight у цьому посібнику.

{kind=link}
Якісне апаратне забезпечення може зменшити потребу у розширеній фільтрації. Переконайтеся, що ваша рама добре спроектована без проблем з резонансом, використовуйте добре збалансовані пропелери та високоякісні двигуни з гладкими підшипниками.
Виконання польоту для аналізу шуму
- Зліт: летіть вперед з мінімальними натисканнями газу та ручки.
- Дроссельна заслінка: повільно нарощуйте газ до 100% протягом 5-10 секунд. Цей тест показує вібрації в діапазоні дросельної заслінки та резонанс рами.
- Повторіть: виконайте 2-3 оберти газу, потім приземліться та роззброїтеся.
Ось як виглядав би типовий журнал перемикання дросельної заслінки (перегляньте нижню панель для змін дросельної заслінки).
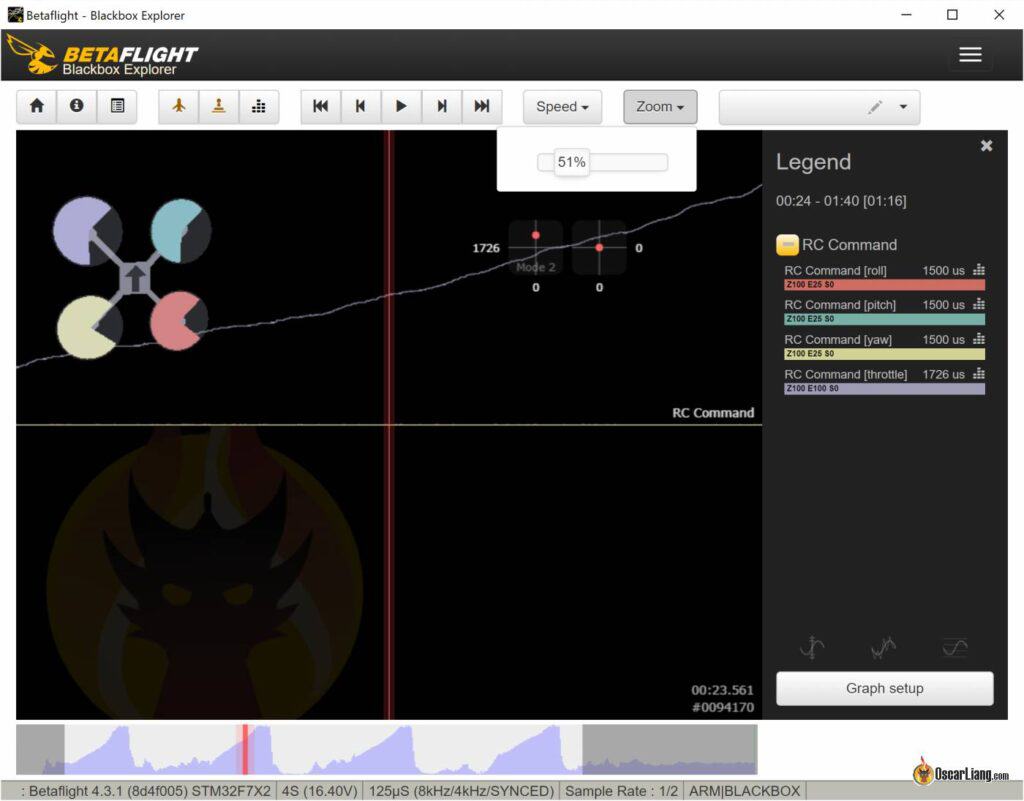
{kind=link}
Пояснення частоти шуму гіроскопа
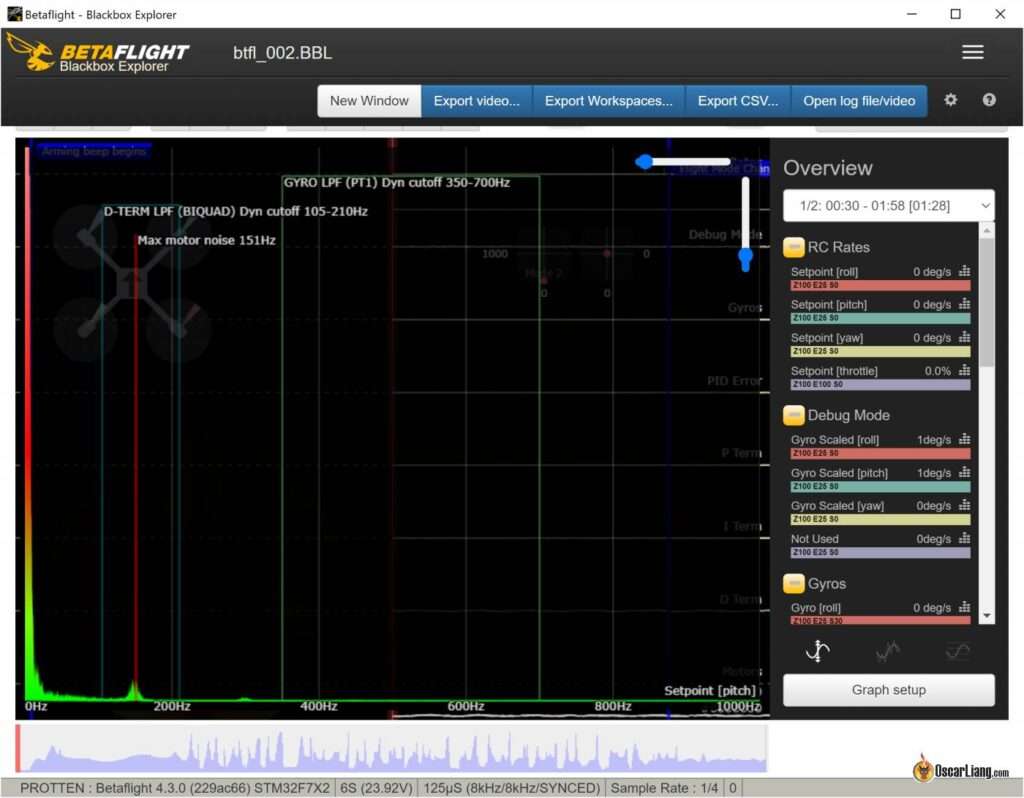
Відкрийте журнал розгорток дросельної заслінки в Blackbox Explorer і натисніть «Gyro_Scaled» на правій панелі, це нефільтрований сигнал гіроскопа. Зніміть злітну та посадкову частини журналу, натиснувши «i» та «o».
Ось розбивка необробленого графіка частоти сигналу гіроскопа від типового 5-дюймового дрона FPV:
- Менше 20 Гц: рух дрона.
- 20 Гц – 100 Гц: Propwash і коливання через неоптимальний PID, проблемну конфігурацію ESC, погані налаштування зв’язку RC тощо.
- 100 Гц – 250 Гц: кадровий резонанс або незакріплені частини.
- Вище 250 Гц: Шум від двигунів і пропелерів, а також гармоніки.

{kind=link}
Все, що нижче 20 Гц, є «хорошим» рухом дрона, який реагує на палички.
У діапазоні від 20 Гц до 100 Гц виникають небажані вібрації, такі як коливання та гальмування. Як правило, у цьому частотному діапазоні ви хочете бачити невелику активність. Наявність трохи це нормально, але занадто багато означає, що у вас є проблема коливання, яку потрібно вирішити. Як правило, ми намагаємося уникати фільтрації нижче 100 Гц, оскільки це реальні рухи дрона, з якими ми хочемо працювати або проти яких. Фільтрування в цьому низькочастотному діапазоні може погіршити ситуацію, оскільки створює величезну затримку. Аналіз спектрів на частоті 100 Гц може дати вам уявлення про проблеми з вібрацією чи коливаннями середньої дросельної заслінки, а також про те, наскільки добре вертоліт справляється з промивкою.
Нас не хвилює нічого вище 1000 Гц, оскільки це мало впливає на наш дрон. Ми хочемо зосередитися на фільтрації шуму між 100 Гц і 1000 Гц.
Затримка через фільтрацію
Можливо, це не інтуїтивно, але надмірна фільтрація може фактично призвести до того, що коливання відображатимуться як шум у спектрі нижче 100 Гц. Це тому, що фільтрація створює затримку. Коли квадроцикл намагається виправити помилку, відповідь може бути надто пізньою через затримку, що може бути контрпродуктивним. Це може погіршити помилку та створити петлю зворотного зв’язку, що спричинить коливання дрона.
Ось чому, якщо ми використовуємо менше фільтрації, проблеми з шумом нижче 100 Гц іноді справді можуть покращитися, оскільки затримка зменшується, а квадроцикл може швидше реагувати, щоб виправити помилки PID. Використання меншої кількості фільтрів також дозволяє підвищити коефіцієнти ПІД-регулятора, що покращує задане значення чотирьох доріжок і допомагає боротися з промиванням.
Ви можете дізнатися, яка затримка додається до сигналу гіроскопа через фільтрацію, побудувавши графік Gyro та Gyro_Scaled і вимірявши розрив між ними.

{kind=link}
У PTB він автоматично оцінює затримку, спричинену фільтрацією гіроскопа та фільтрацією D-term (див. верхній правий кут першого графіка у другому стовпці).

{kind=link}
Стратегія фільтра
Моя загальна стратегія фільтрації полягає в тому, щоб усунути смуги шуму двигуна за допомогою фільтра RPM, потім придушити кадровий резонанс за допомогою динамічних режекторних фільтрів і, нарешті, зменшити мінімальний рівень шуму навколишнього середовища за допомогою гіроскопа та фільтрів нижніх частот D-term. Я буду налаштовувати фільтри в такому порядку:
RPM Filter > Dynamic Notch Filter > Gyro Lowpass > D-term Lowpass
Ми хочемо використовувати якомога менше фільтрації, щоб мінімізувати затримку, але в той же час нам потрібна достатня кількість фільтрації, щоб уникнути спалювання наших двигунів під час польоту додому з погнутою опорою. Ви, звичайно, можете перестрахуватися й застосувати більше фільтрів, ніж потрібно, але надмірне фільтрування змушує дрон відчувати себе відключеним і повільно реагувати через збільшену затримку. Це також може погіршити промивання. Отже, потрібно прагнути до балансу.
Окрім перевірки журналів Blackbox, температура двигуна є ще одним корисним показником у налаштуванні фільтра. Коли двигуни стають занадто гарячими, зазвичай це означає, що фільтрація занадто агресивна.
Професійна порада: гарячі двигуни – наскільки гаряче занадто гаряче?
Як правило, якщо ви затиснули дзвінок двигуна і не можете тримати пальці на ньому довше кількох секунд, це означає, що він занадто гарячий, і ви, ймовірно, надто агресивно змінюєте налаштування.
Наскільки чиста ваша будівля?
Перш ніж почати налаштування, важливо перевірити, чи є у вас чиста збірка. Почніть з виконання дросельної заслінки, як описано раніше.
Завантажте журнал у PIDToolBox, клацніть Spectral Analyzer, виберіть «Gyro prefilt» (необроблений, нефільтрований сигнал гіроскопа; «Gyro» — це відфільтрований сигнал) і натисніть «Виконати».

{kind=link}
Налаштування фільтра за замовчуванням у Betaflight є досить консервативними, і більшість збірок повинні мати можливість зменшити фільтрацію звідти. Якщо ваш квадроцикл уже шумить із налаштуваннями фільтра за замовчуванням, замість того, щоб посилити фільтрацію, вам слід шукати можливі механічні чи електричні проблеми. Переконайтеся, що у вас є конденсатор на вхідній потужності ESC, усі гвинти затягнуті, і ви використовуєте нові опори тощо.
На чистому 5-дюймовому квадроциклі має бути невелика активність між ~50 Гц (рухи квадроцикла) і ~200 Гц (вібрація двигуна). Якщо у вас багато шуму в цьому регіоні, це може бути електричний шум (можливо, вхідна потужність гіроскопа надто шумна, або для цього потрібен додатковий конденсатор на вхідній потужності ESC) або механічний (наприклад, дріт, що торкається гіроскопа). Досягти оптимальної фільтрації в цих умовах було б складніше.
Як запропонував автор PIDToolBox, ідеально мати загальний рівень шуму нижче -30 дБ вище 50 Гц. Для D-терму ідеально мати загальний рівень шуму нижче -10 дБ. Вивчення рівня шуму в цих регіонах може дати вам гарне уявлення про те, наскільки плавно літає ваш квадроцикл. На рівень шуму впливає якість збірки дрона, якість апаратного забезпечення, а іноді у вас може бути просто шумний гіроскоп.
Якщо ваш квадроцикл шумніший, ніж це (наприклад, є пік посередині вище 0 дБ), тоді вам знадобиться більше фільтрації. Це не кінець світу; це просто означає, що затримка буде вищою, і ви не зможете збільшити коефіцієнти PID так високо.
Налаштування фільтра RPM
Шум двигуна є основним джерелом шуму для дронів FPV, а RPM-фільтр є одним із найефективніших фільтрів у Betaflight для боротьби з шумом двигуна. У чистій збірці фільтр RPM і фільтри Dynamic Notch виконають більшу частину роботи, дозволяючи нам вимкнути багато інших фільтрів, щоб мінімізувати затримку.
Давайте розглянемо кілька прикладів шуму двигуна:
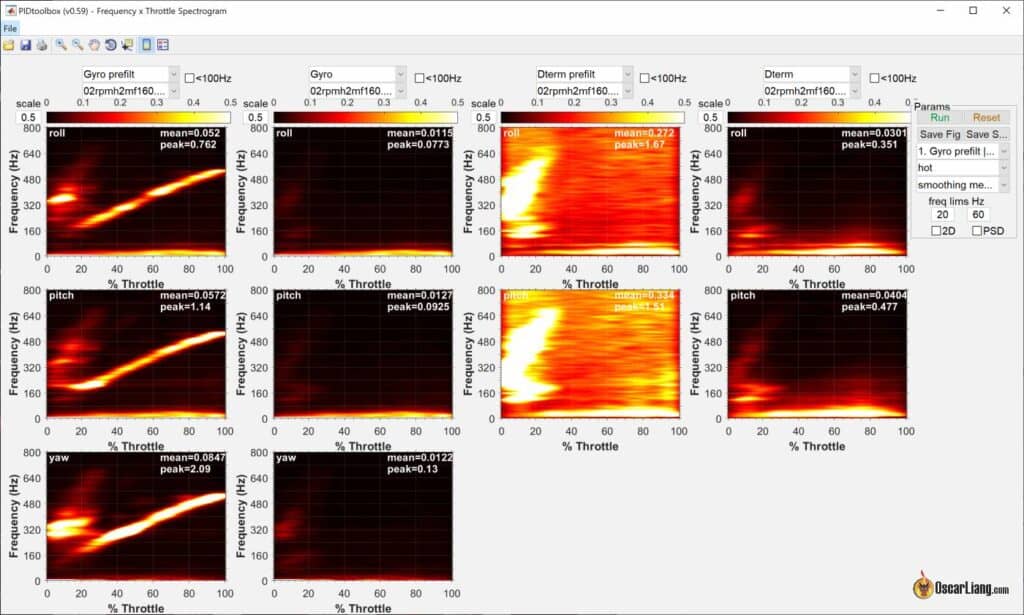
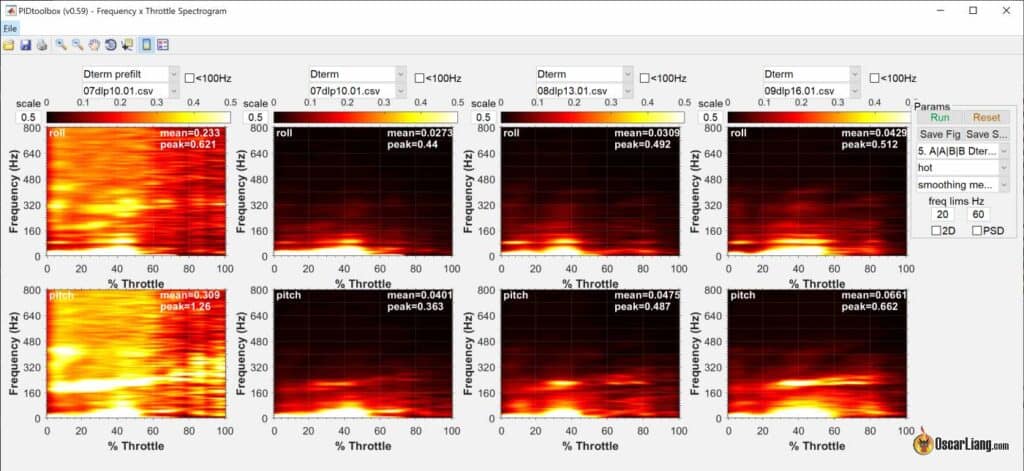
- Завантажте журнал «Throttle Sweeps» у PTB, клацніть Spectral Analyzer і натисніть « Freq x Throttle ».
- У розділі « Presets » виберіть « Gyro Prefilt, Gyro, Dterm Prefilt, Dterm » і натисніть «Виконати». Це те, що я називаю «теплові карти».

{kind=link}
Ось розбивка того, що ми розглядаємо:
- Близько до 0 Гц : дуже яскрава горизонтальна лінія внизу (1) відображає рух дрона, який реагує на палички.
- Приблизно 200 Гц : Ця горизонтальна лінія (2) вказує на кадровий резонанс. Його частота не змінюється з положенням дросельної заслінки, але найсильніша там, де вона перетинається з діапазоном двигуна.
- Смуга основного шуму двигуна : ця діагональна лінія (3) зазвичай найяскравіша. Частота шуму двигуна зазвичай зростає з підвищенням рівня газу.
- Гармоніки : це кратні смузі основного шуму двигуна. У нашому прикладі гармоніки (часто тьмяніші та їх важче помітити) відображаються у вигляді ліній (4) і (5). Спробуйте відрегулювати масштаб, якщо їх не видно. Зверніть увагу, що 2-лопатеві гвинти, як правило, демонструють більше і сильніші гармоніки, ніж 3-лопатеві гвинти.

{kind=link}
Ми будемо використовувати фільтр RPM, щоб подбати про ці смуги шуму двигуна.
Мета полягає в тому, щоб оптимізувати кількість використовуваних гармонік RPM і встановити максимально можливу «мінімальну частоту» на основі початкової частоти діапазону двигуна. Менша кількість гармонік RPM і вища мінімальна частота призводять до меншої фільтрації та меншої затримки.
Скористайтеся інструментом Data Cursor Tool, клацніть там, де починається рухова смуга, щоб знайти точну частоту. Підтвердьте це на графіках крену/тангажу/рискання та візьміть найнижчу частоту.

{kind=link}
Ось приклад із моєї нової збірки Source One V5 :
- Ліворуч розташований фільтр RPM за замовчуванням, 3 гармоніки з мінімальною частотою 100 Гц.
- Праворуч я змінив його на 2 гармоніки з мінімальною частотою 160 Гц
Зменшивши одну гармоніку та підвищивши частоту зрізу, ви, можливо, зможете побачити більше нефільтрованого шуму від 3-ї гармоніки двигуна.

{kind=link}
Хоча він досить слабкий, він все ще може посилюватися, коли потрапляє в термін D. Давайте перевіримо теплову карту Dterm нижче праворуч, як ви бачите, крихітна частинка шуму гіроскопа стала досить поганим шумом Dterm.
{kind=link}
У цьому прикладі, мабуть, краще мати 3 гармоніки у фільтрі обертів.
Інша річ, яку ви могли помітити, це деякий шум навколо 116 Гц, який залишився нефільтрованим, оскільки ми підвищили мінімальну частоту до 160 Гц. Щоб вирішити цю проблему, ми повинні знизити мінімальну частоту, тобто приблизно на 20 Гц нижче частоти шуму було б ідеальним.

{kind=link}
Ось порівняння сигналу гіроскопа після фільтрації з використанням 3 різних налаштувань:
- зліва: 2 гармоніки 160 Гц хв
- середній: 3 гармоніки 130 Гц хв
- праворуч: 3 гармоніки 100 Гц хв

{kind=link}
Здається, ми не можемо зменшити частоту обертів фільтра, щоб придушити смуги двигуна. У цьому прикладі налаштування за замовчуванням (3 гармоніки та мінімальна частота 100 Гц) працювали найкраще.
Кросфейдинг RPM
Ця розширена функція зменшує силу фільтра частоти обертання в певному діапазоні (на кшталт TPA). Стандартне значення підходить для більшості 5-дюймових збірок, але його можна оптимізувати, особливо для великих або менших збірок, оскільки шум двигуна може початися з вищою або нижчою частотою, і вам може знадобитися, щоб він зникав швидше або повільніше, залежно від шуму. Ця функція доступна лише в CLI, наприклад:
встановити rpm_filter_min_hz = 100
встановити rpm_filter_fade
Це означає, що RPM-фільтр починається зі 100 Гц при мінімальній інтенсивності та досягає повної потужності при 150 Гц.
Значення Q
Збільшення значення Q режекторного фільтра робить його більш зосередженим на цільовій частоті, зменшуючи затримку. Налаштуйте це в CLI:
встановити rpm_filter_q = 500
Значення за замовчуванням 500 зазвичай працюють добре, але ви можете точно налаштувати, збільшуючи значення Q, доки шум двигуна не стане видимим на відфільтрованій діаграмі гіроскопа, а потім відключіть. Не перевищуйте 1000.
RPM Filtering Dimming
Це дозволяє індивідуально керувати кожним фільтром RPM для цільових гармонік. Наприклад, при використанні 3-лопатевих гвинтів друга гармоніка зазвичай не дуже сильна, але 3-я гармоніка є. У цьому випадку ви можете використовувати більшу силу фільтрації на 3-й гармоніці та меншу на 2-й:
встановити rpm_filter_weights = 100, 0, 80
А при використанні 2-лопатевих пропелерів, де 2-га гармоніка сильніша за 3-тю гармоніку, ви можете зробити щось подібне:
встановити rpm_filter_weights = 100, 80, 0
Ви можете додатково зменшити вагу фільтра RPM, якщо шум двигуна не видно на діаграмі відфільтрованого гіроскопа.
Налаштування динамічного режекторного фільтра
Динамічний режекторний фільтр пригнічує піки сигналу гіроскопа, які здебільшого спричинені вібрацією рами або інших апаратних компонентів, таких як резонанс рами, антени, кріплення GoPro та зігнуті пропелери.
Коли фільтр RPM увімкнено, Betaflight автоматично зменшить обсяг фільтрації Dynamic Notch, використовуючи меншу кількість вирізів і вищі значення Q, оскільки фільтр RPM виконуватиме більшу частину важкої роботи. Ви можете додатково налаштувати фільтр Dynamic Notch відповідно до ваших налаштувань.
Визначте кадрові резонанси : подивіться на теплову карту та визначте, скільки існує кадрових резонансів, щоб визначити кількість необхідних вирізів. Можна використовувати до 5 виїмок, але зазвичай достатньо 1 або 2, якщо ваш дрон погано побудований або в побитому стані. Якщо ввімкнути RPM-фільтр, 1 виїмки зазвичай достатньо для обробки кадрового резонансу.
Визначити значення Q : значення Q визначає ширину фільтра. Більше значення Q означає вужчий фільтр, що призводить до меншої фільтрації та меншої затримки.
- Q за замовчуванням : Почніть із стандартного Q 500.
- Налаштуйте Q : якщо значення за замовчуванням працює добре, спробуйте збільшити його до 600 або навіть 700. Уникайте перевищення 1000. Якщо після фільтрації ви все ще бачите кадровий резонансний шум, зменште значення Q.
- Перевірте теплову карту D-терміну : проаналізуйте теплову карту D-терміну, щоб побачити, як зміни значення Q впливають на шум D-терміну.
Set Min/Max Frequency : це частоти зрізу, що визначають ефективний діапазон динамічного режекторного фільтра. Додайте 20-30 Гц до кожної сторони резонансу для діапазону.
З міркувань безпеки не встановлюйте занадто високу мінімальну частоту, оскільки зігнуті опори можуть створити сильний резонанс. У разі аварії ширший діапазон частот може допомогти вловити нові резонанси та запобігти перегріву чи пошкодженню двигуна. Ми точно не знаємо, де саме буде цей резонанс, але маючи ширший діапазон частот, ми маємо більше шансів вловити його. Якщо Dynamic Notch не вловить ці нові резонанси через занадто високу мінімальну частоту, ваші двигуни можуть нагрітися або навіть згоріти в таких ситуаціях.
Без фільтра частоти обертання : якщо ваш квадроцикл не може використовувати фільтр частоти обертання, наприклад, на крихітному вигуку, ви можете спробувати ввімкнути динамічний режекторний фільтр із 5 гармоніками, добротністю 350 і мінімальною частотою на 100 Гц як початковою точкою, а потім налаштувати його, підвищуючи його.
У прикладі установки, здається, існує один кадровий резонанс близько 210 Гц.

{kind=link}
Я спробував збільшити Q до 700 і встановити мінімальну/максимальну частоту на 160-230 Гц, але Q явно був занадто високим. Існує більше нефільтрованого шуму, він потрапляє в Dterm і посилюється.

{kind=link}
Нарешті, коли я встановлю Q на 450, шум адекватно контролюється. На наведених нижче графіках ліворуч Q=700, праворуч Q=450. Ви можете ще раз перевірити теплову карту Dterm, щоб переконатися, що вона працює добре.

{kind=link}
Налаштування фільтра нижніх частот гіроскопа
У більшості випадків ви можете почати з вимкнення фільтра Gyro Lowpass 1, оскільки він часто непотрібний. Випробуйте агресивний політ протягом 30 секунд і перевірте температуру двигуна, щоб переконатися, що він не гарячий, перш ніж продовжити.
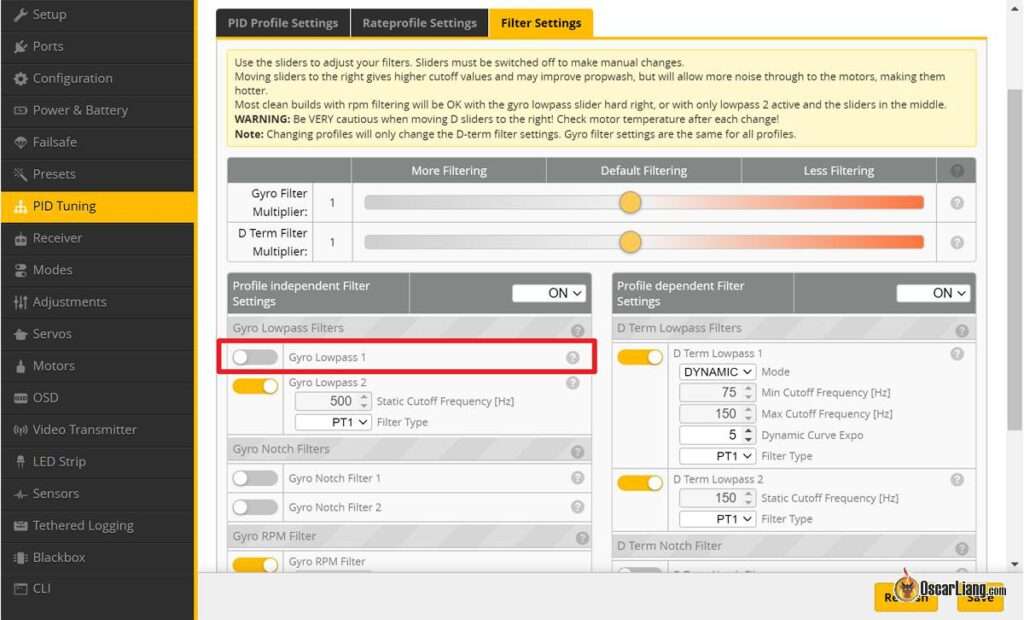
{kind=link}
Використовуйте повзунок «Gyro Filter Multiplier», щоб зменшити Gyro Lowpass 2 на пару ступенів за раз. Переміщення повзунка вправо збільшує частоту, що зменшує фільтрацію, що призводить до меншої затримки, кращого керування промивкою та потенціалу для вищих посилень ПІД.
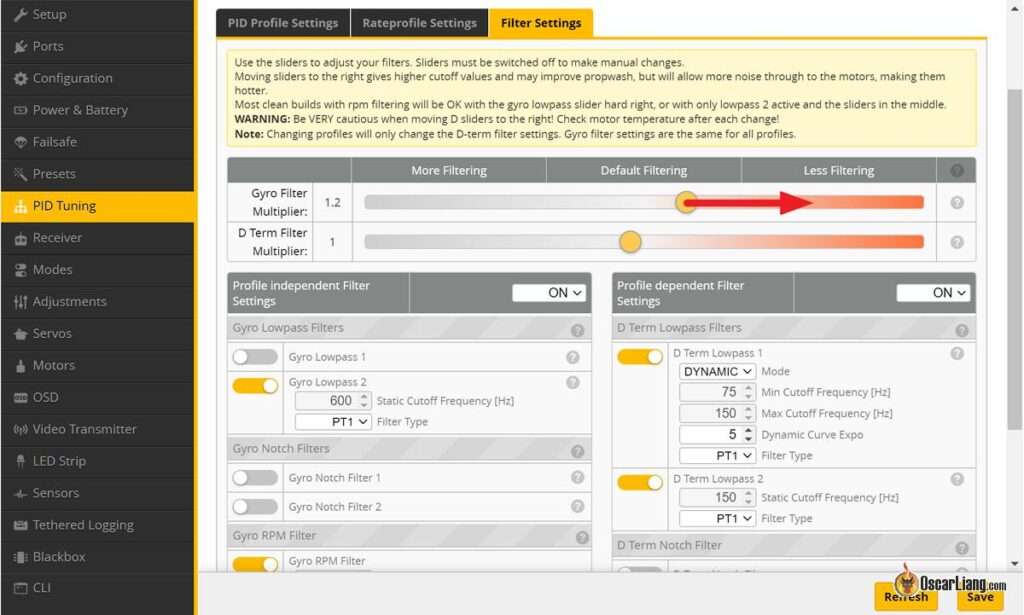
{kind=link}
Ось порівняння частотного спектру гіроскопа при різних значеннях повзунка фільтра низьких частот гіроскопа: 1,0 (коричневий), 1,5 (червоний) і 2,0 (помаранчевий).
Три лінії майже перекриваються, що свідчить про те, що фільтр низьких частот гіроскопа істотно не впливає на сигнал і його можна зменшити. Цікаво, що шум у діапазоні нижче 100 Гц трохи покращується з меншою фільтрацією, що узгоджується з нашими попередніми обговореннями.
Важливі міркування:
- Ніколи не вимикайте фільтр Gyro Lowpass 2 для частот петлі PID 2K/4K через згладжування.
- Мінімальна частота :
- Для часу циклу 2K залиште Gyro Lowpass 2 мінімум на 500 Гц.
- Для 4K ви можете встановити Gyro Lowpass 2 до 1000 Гц.
- Для 8K ви можете повністю вимкнути Gyro Lowpass 2, якщо шум не є проблемою.

{kind=link}
Налаштування D Term Lowpass
Термін D набагато шумніший, ніж гіроскоп, через його чутливу природу, і шум посилюється зі збільшенням частоти. Тому будьте дуже обережні та консервативні, коли маєте справу з фільтрацією термінів D.
Спробуйте перемістити повзунок «D Term Filter Multiplier» вправо на щабель за раз і подивіться, як дрон відреагує під час 30-секундного тестового польоту (виконайте кілька акро-рухів), а також перевірте температуру двигуна після приземлення. Якщо вони нагріваються, вам слід повернутися на один-два кроки назад.
Уникайте надмірної агресивності, зменшивши фільтрацію термінів D. Залиште деякий вільний простір для можливих погнутих опор під час польоту. Занадто низька фільтрація D Term у поєднанні з пошкодженим пропелером може призвести до гарячих або згорілих двигунів.
Ось порівняння положень повзунка D-term фільтрації: 1,0 (коричневий), 1,3 (червоний) і 1,6 (помаранчевий). Як видно на тепловій карті, менша фільтрація призводить до більшого шуму для D-терму, на відміну від низькочастотного гіроскопа.
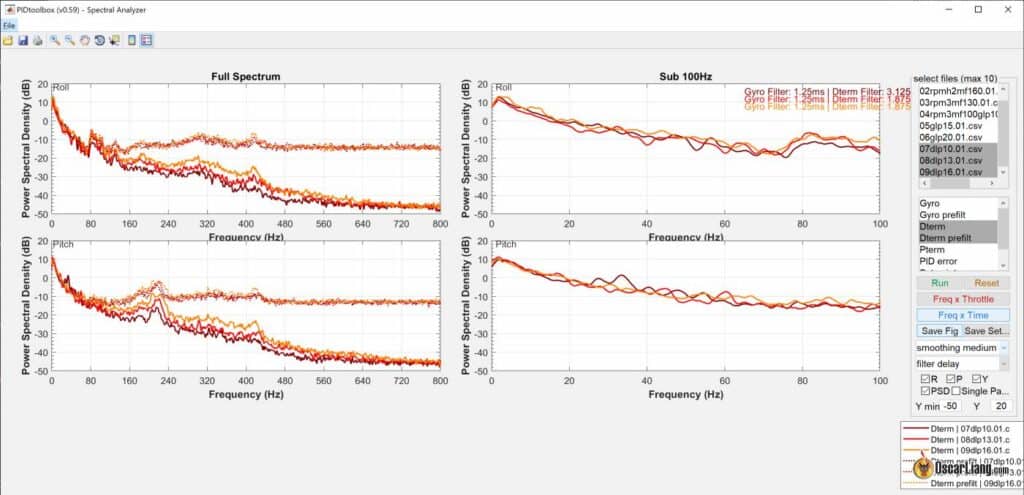
{kind=link}
Зліва направо теплова карта показує нефільтрований D-терм, D-term фільтр нижніх частот на 1,0, 1,3 і 1,6.
Якщо ви чуєте, як двигуни стають грубими (захоплюючі коливання), коли ви зменшуєте фільтрацію D-term, це пов’язано зі зростанням шуму нижче 100 Гц. Ви можете підтвердити це, перевіривши графіки <100 Гц. У цьому прикладі залишатися нижче 1,3, можливо, 1,2 або навіть просто 1,1, було б безпечніше.
{kind=link}
Після налаштування підсилення PID перегляньте фільтрацію D Term, щоб побачити, чи можна її додатково оптимізувати.
Якщо сліди D Term дуже шумні, один або два клацання додаткової фільтрації на повзунку можуть допомогти. Якщо слід D дуже чистий, можливо, ви можете трохи зменшити фільтрацію (якщо двигуни не гарячі). Подивіться на графіки нижче, ліворуч є галасливий D термін, правий набагато чистіший.

{kind=link}
Важливо: НІКОЛИ не вимикайте фільтри низьких частот D-Term повністю, ви спалите свої двигуни.
Gyro/D Term Notch Filters
Немає необхідності вмикати Gyro Notch Filter і D Term Notch Filter, це статичні режекторні фільтри, які стали застарілими, оскільки RPM-фільтр і динамічні режекторні фільтри виконують більшу частину роботи.
Однак, якщо є сильний резонанс на певній частоті (наприклад, кадровий резонанс), статичний режекторний фільтр може бути корисним. Динамічний режекторний фільтр зазвичай покриває його, тому статичний режекторний фільтр часто непотрібний. Ви можете спробувати додати статичну виїмку для відомого кадрового резонансу та зменшити кількість динамічних виїмок на одиницю, щоб побачити, яка стратегія краще працює для ваших налаштувань.
Фільтр низьких частот Yaw
Фільтр нижніх частот повороту за замовчуванням із частотою зрізу 100 Гц має мінімальну затримку, і його можна не змінювати. Цей фільтр особливо корисний під час зіткнення, оскільки він допомагає зменшити обертання під час зіткнень.
Налаштування PID
Щоб налаштувати PID за допомогою Blackbox, я використовую метод «Basement Tuning» за допомогою PIDToolBox. Цей метод зручний для початківців, і його можна використовувати в невеликому приміщенні, наприклад у підвалі або спальні, звідки і назва. Він передбачає виконання серії коротких польотів із дещо різними значеннями PID, а потім порівняння журналів для визначення оптимального приросту.
Під час польотів рухайте квадроциклом по осях тангажу та катання. Ви можете дізнатися більше про метод підвалу в цьому відео PIDToolbox .

{kind=link}
Хоча цей метод називається «підвальне налаштування», мені незручно робити це в приміщенні. Раніше у мене було кілька випадків «польоту на Місяць», коли я ледь не просвердлив дірку в стелі. Тому для безпеки я завжди проводжу ці тести в саду чи місцевому парку.
Профіль оцінки та кутовий режим
Виконання польотів з налаштування підвалу вимагає хороших навичок польоту в зоні прямої видимості, щоб утримувати дрон під контролем у обмеженому просторі. Ось кілька порад, як це зробити легше. Спробуйте цей тарифний профіль:
- Центральна чутливість 250
- Максимальна ставка 400
- Експо 0.00
Цей профіль має низьку максимальну швидкість, що зменшує ймовірність втрати контролю, якщо ви занадто сильно рухаєте ручками. Висока і лінійна чутливість центральної ручки забезпечує достатню значущість вхідних сигналів ручки для точного реєстрації.
Виконання тесту в режимі Angle може зробити його ще простішим, ніж у режимі Rate. За словами автора PIDToolBox, режим Angle працює так само добре, як і режим Rate, але спочатку потрібно зробити наступне:
- Перейдіть на вкладку «Налаштування» та відкалібруйте акселерометр.
- У налаштуваннях профілю PID встановіть силу режиму кута на 100.
- Натисніть «Зберегти», щоб переконатися, що зміни застосовано.
Знаходження P/D балансу
Перш за все, зменште ці підсилення, щоб вони не заважали нашій настройці:
- Встановіть повзунок «Відповідь стику» (Подача вперед) на 0
- Встановіть повзунок «Dynamic Damping» (D Max) на 0
- Встановіть повзунок «Drift-Wobble» (посилення I) на 0,2 , він достатньо низький, щоб не створювати перерегулювання, але має лише невеликі значення I, щоб краще стабілізувати квадроцикл, полегшує керування

{kind=link}
Відрегулюйте повзунок «Демпінг» (D посилення), почніть з мінімального значення, яке ви хочете перевірити. Для типового 5-дюймового дрона FPV 0,6 є хорошою відправною точкою.

{kind=link}
Ось що ви хочете виконати в польоті:
- Озброїтися і зависнути
- Постійно переміщайте рол і пітч-стик протягом 20-30 секунд , чим більше рухів, тим точніше буде
- Робіть якомога більші рухи, не вдаряючись об стіни (в ідеалі повні відхилення палиці)
- Ви можете одночасно рухати подачу та крен, доки можете тримати це під контролем
- Намагайтеся не зупинятися/зависати надто довго під час польоту, і будьте якомога постійнішими
Підніміть повзунок Damping на 0,2 кожного разу та повторіть політ: наприклад, 0,6, 0,8, 1,0, 1,2, 1,4, 1,6 . Якщо ви підвищите посилення D надто високо, ваші двигуни будуть звучати грубо, тому ви не завжди можете перевірити одне або два останні значення, що добре.
Найшвидший спосіб змінити значення повзунка — зайти в екранне меню Betaflight, Профіль, Спрощене налаштування. Але якщо ви не можете це зробити, просто підключіть USB-кабель і скористайтеся Конфігуратором Betaflight.
{kind=link}
Рекомендується міняти батарею кожні 2-3 польоти, щоб напруга не вплинула на результат. Увімкніть квадроцикл, від’єднавши батарею перед кожним польотом, щоб створити новий журнал. Або просто виберіть «Зберегти та перезавантажити» в екранному меню, щоб вам не потрібно було від’єднувати пристрій.
16 Мб пам’яті вистачить для шести 30-секундних польотів, якщо ви правильно розрахуєте час.
Виконавши всі польоти, завантажте їх на свій комп’ютер. Щоб краще впорядкувати журнали, я створив структуру папок для цього процесу, завантажте її тут: https://drive.google.com/file/d/1tx1AV2lOMgknAwIB3VFhqP1i6VpDLVjr/view?usp=share_link

{kind=link}
І я перейменував журнали на щось на кшталт « 01 d06 », « 02 d08 » тощо (01 означає перший тестовий політ, d06 означає значення повзунка демпфування 0,6) і поклав їх у папку « 02 PD Balance ».
Завантажте всі журнали в PTB, перегляньте кожен і видаліть злітну та посадкову частини для кожного журналу (для цього увімкніть « Обрізати » на правій панелі).

{kind=link}
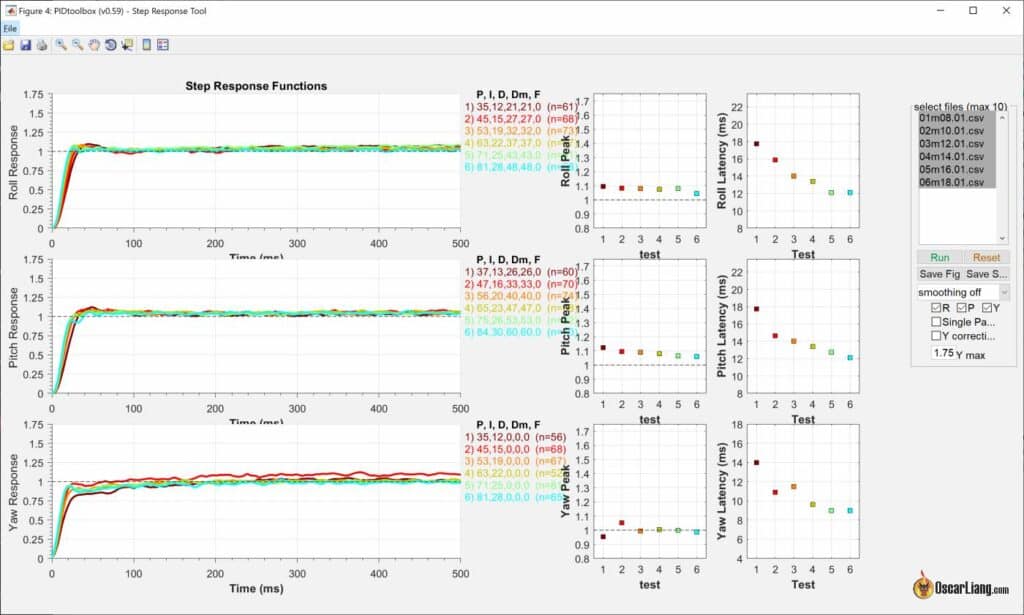
Натисніть « Step Resp Tool », виберіть усі файли та натисніть « Запустити» . якщо у вас є зміщення кривих (крива гіроскопа віддаляється від заданого значення до кінця), увімкніть Y Correction.
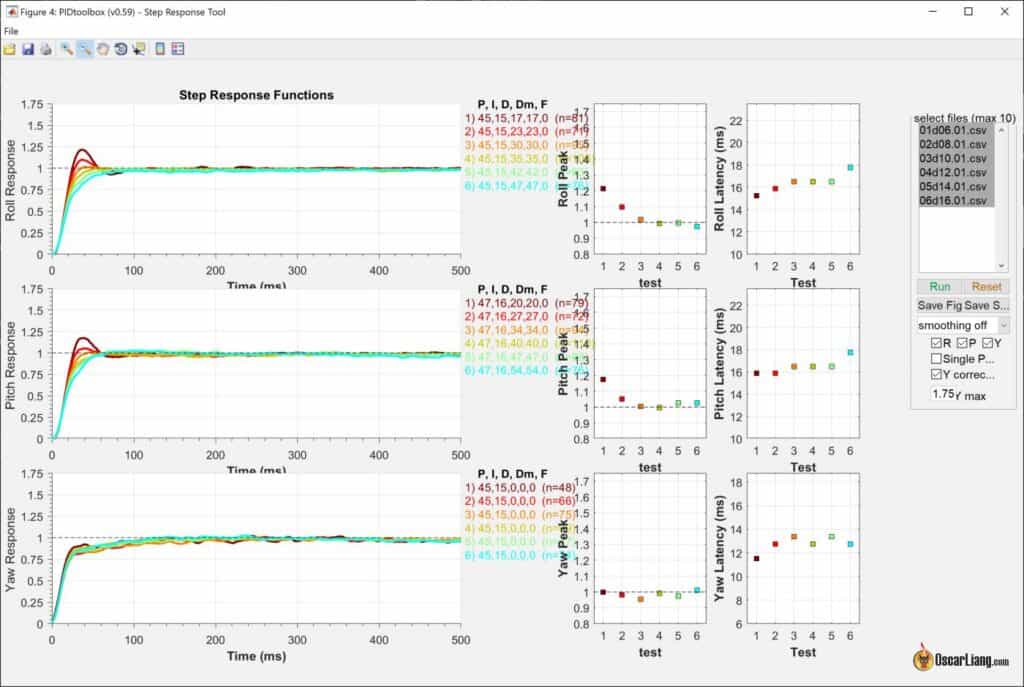
{kind=link}
Це досить просто, просто виберіть найкращу лінію, це ваше оптимальне значення повзунка демпфування. Ідеальна відповідь має виглядати приблизно як зелена лінія на наступному графіку, з невеликим перевищенням або без нього. Припустимо невелике перевищення.

Якщо ваші сліди не виглядають плавними, але мають багато підйомів і спадів, це називається коливанням і свідчить про те, що сигнал занадто шумний або ваші рухи недостатньо сильні.
Графіки праворуч також надзвичайно корисні:
- Пік – це найвища амплітуда викиду (в ідеалі, чим ближче до 1, тим краще)
- Затримка – це час, необхідний для досягнення заданого значення (в ідеалі, чим менше, тим краще)

{kind=link}
Коли посилення D низьке, ви отримаєте перерегулювання або навіть коливання. Коли підсилення D збільшується, перевищення буде менше, а пік зменшиться, але в результаті затримка зросте. Коли D занадто високий (недорозмір), початковий пік може навіть не досягти заданого значення, і це не ідеально. Знайдіть відповідь, яка має мінімальне перевищення, але водночас має відносно низьку затримку .
Ви можете збільшити масштаб і побачити його більш чітко (або виберіть менше журналів і знову натисніть «Виконати»). Нам потрібно лише поглянути на вісь Roll і Pitch.
У нашому прикладі цілком зрозуміло, що ідеальним значенням є помаранчевий колір (3) як для нахилу, так і для нахилу, тому це буде 1,0.
Досить часто мати різний баланс PD на тангажі та крені через різний розподіл ваги. Якщо це ваш випадок, перемістіть повзунок «Демпінг» у потрібне положення для кроку, запишіть посилення кроку D, потім перемістіть повзунок «Демпінг» у потрібне положення для крену та налаштуйте повзунок «Демпінг» відповідно до посилення кроку D, яке ви щойно записали.

{kind=link}
Іноді краще бути трохи консервативнішим і уникати надто високого приросту D. Якщо ви перебуваєте на паркані, завжди використовуйте менший коефіцієнт посилення D (вище співвідношення P/D), щоб ви могли збільшити загальний коефіцієнт посилення PID вище в кінці, оскільки D зазвичай є обмежуючим фактором.
Те, що я виявив, це те, що інструмент крокової відповіді має тенденцію бути досить чутливим, і баланс P/D може бути нижчим, ніж я особисто віддаю перевагу. Тому я зазвичай збільшую P/D баланс на 5-10% після знаходження ідеального значення. Це лише мої особисті переваги, ви можете спробувати, якщо хочете.
Розмір дрона також впливає на співвідношення PD, більші дрони, як правило, мають вище співвідношення P:D. Наприклад, 5 дюймів може використовувати повзунок амортизації 0,8-1,1, тоді як крихітний крик може використовувати 1,4-1,6.
Знаходження максимального посилення D
Виконайте той самий тест для повзунка Master Multiplier, пересуньте повзунок на 0,2 кроку. Для 5-дюймового дрона почніть із таких значень, як 0,8, 1,0, 1,2, 1,4, 1,6 і 1,8.

{kind=link}
Будьте обережні та не стойте надто близько до квадроцикла під час цього тесту. Коли посилення D занадто високе, квадроцикл може несподівано піднятися. Зверніть пильну увагу на шум двигуна та негайно зупиніться, якщо почуєте хвилюючі коливання.
{kind=link}
Ви можете помітити, що форми ступінчастої відповіді не сильно змінюються між різними значеннями, а пікові значення залишаються приблизно однаковими. Це пояснюється тим, що форма кривої відгуку в основному визначається співвідношенням P/D. Збільшення підсилення не вплине суттєво на форму відгуку, але збільшення підсилення P/D може зменшити затримку.
Ви досягли ідеального приросту основного множника, коли відбувається одне з наступного:
- Захоплююче коливання : якщо ви почуєте захоплююче коливання, ви не можете далі збільшувати посилення D.
- Плато затримки : якщо затримка більше не зменшується (або дуже мало), це означає, що ви досягли верхньої межі вікна налаштування. Двигуни працюють на максимальній потужності, і ви більше не отримуєте від них продуктивності.
Максимальний досяжний посилення залежить від рівня шуму вашої збірки та обсягу використаної фільтрації. Менше фільтрування забезпечує вищі коефіцієнти ПІД. Іноді безпечніше зменшити повзунок головного множника на одну або дві сходинки, коли ви знайдете максимальне значення. Уникайте максимального підсилення D, щоб врахувати потенційні проблеми, наприклад погнуті опори.
Безпілотники, які використовують батареї з більшою кількістю елементів (вища напруга), як правило, вимагають менших посилень D. Наприклад, на 6S квадроциклі приріст D може становити 30 с, тоді як на 4S він зазвичай становить 40 с.
У моєму прикладі 1,6, здається, є значенням, яке дає найменшу затримку, з невеликим покращенням при збільшенні до 1,8.
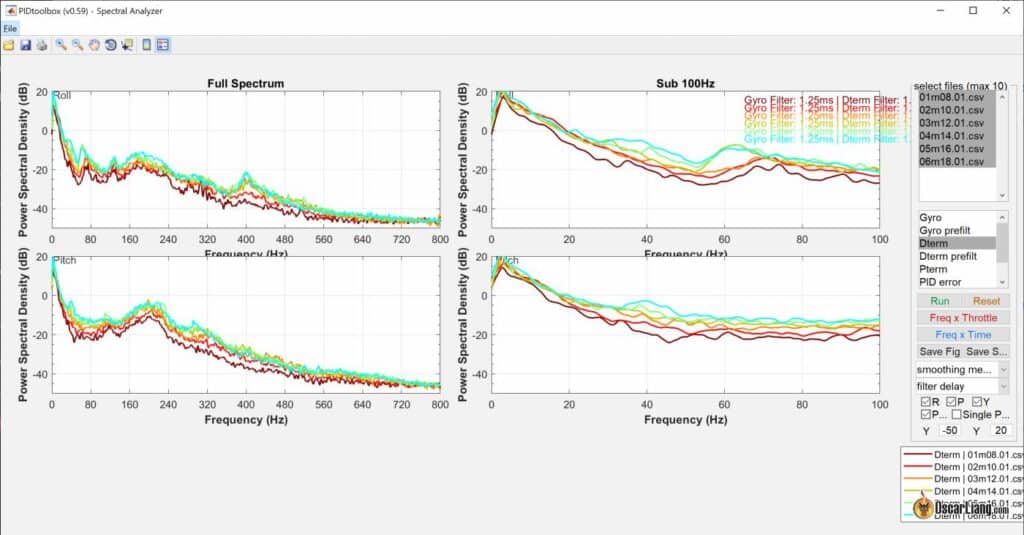
Якщо ви не можете почути хвилюючі коливання, скористайтеся спектральним аналізатором, щоб побудувати D-член. Зі збільшенням підсилення двигуни можуть видавати захоплюючий звук з піком приблизно 40-80 Гц, особливо при дроселі. Якщо шум у цьому частотному діапазоні зростає з вищими підсиленнями, це вказує на початок коливань, пов’язаних з ФІД.
У цьому прикладі ви можете чітко побачити піки навколо 60 Гц для 1,4 (оливковий), 1,6 (зелений) і 1,8 (блакитний). Хоча 1.6 показує покращення затримки, я б не ризикував і, ймовірно, вибрав би 1.4 або навіть 1.3, щоб бути безпечним.
{kind=link}
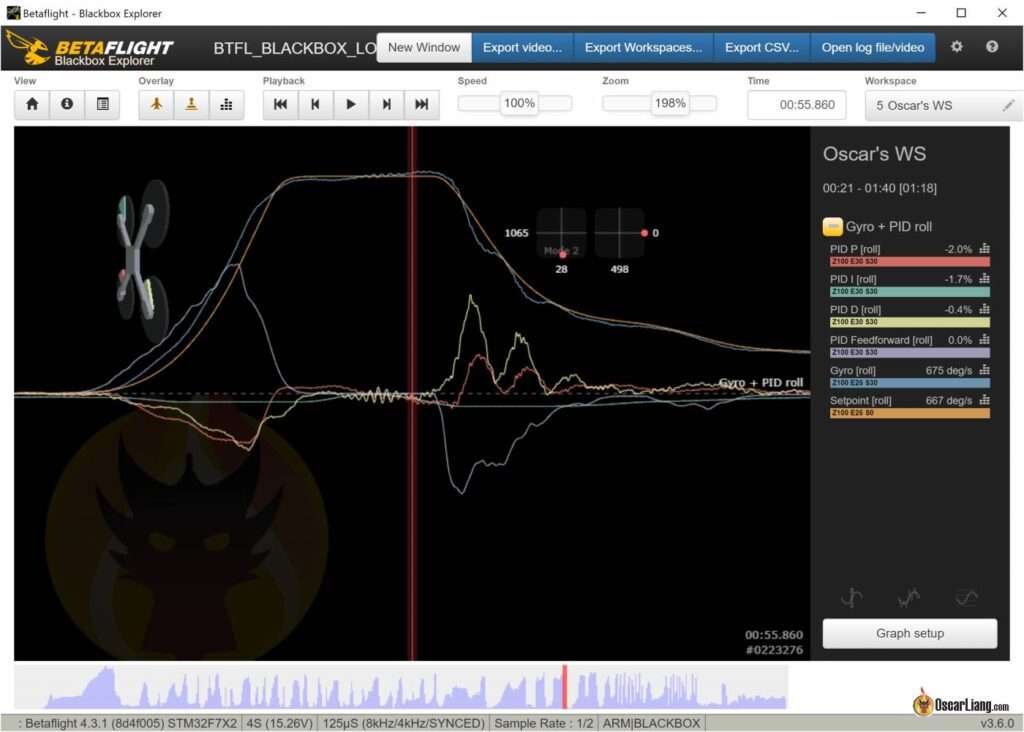
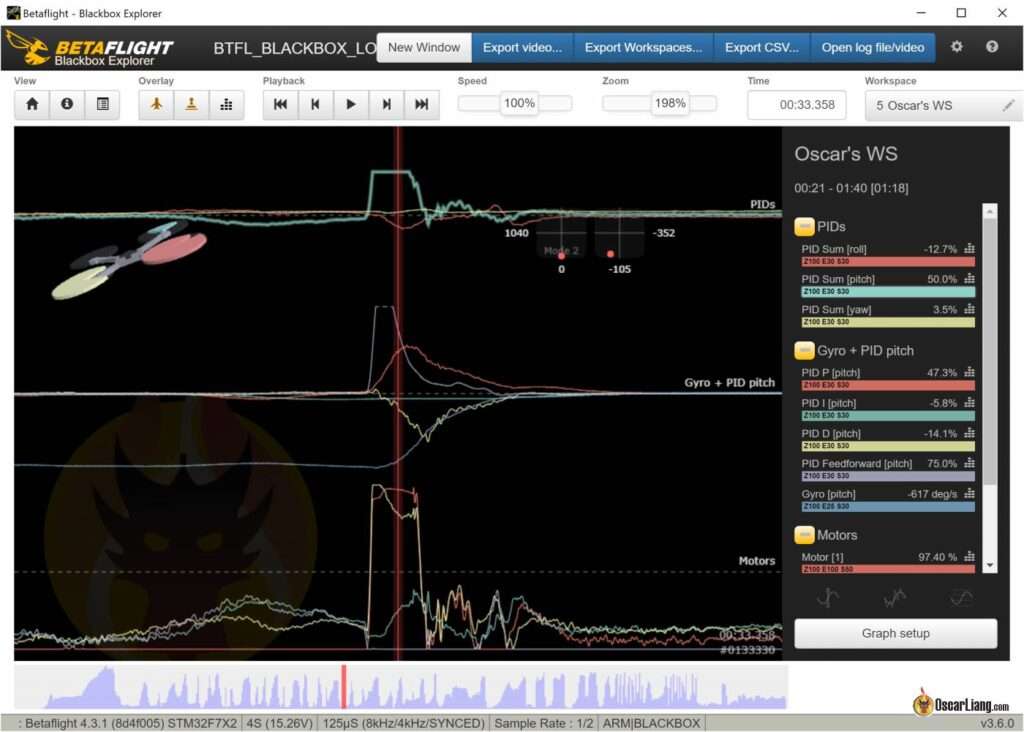
Після визначення оптимального посилення D перевірте відстеження заданого значення, побудувавши графік гіроскопа та заданого значення. Лінії мають бути приблизно паралельними, що вказує на те, що квадроцикл прискорюється та сповільнюється з тією ж швидкістю, що й задане значення. Однак між ними все ще може бути значний розрив, що вказує на затримку. На наступному кроці ми зменшимо цей розрив за допомогою Feedforward.
{kind=link}
Налаштування подачі вперед
Подача вперед (FF) прискорює ваш квадроцикл, коли ви переміщуєте ручки, роблячи ваш квадроцикл більш чуйним і ближчим до заданого значення. На відміну від елемента P, який реагує лише на помилку PID, Feed Forward вимірює швидкість відхилення ручки. Він змушує двигуни рухатися, як тільки рухається ручка, що робить його набагато швидшим, ніж термін P.
Feed Forward допомагає квадроциклу миттєво реагувати на введення ручки, забезпечуючи більш миттєвий і контрольований досвід польоту. Це корисно для всіх стилів польоту, включно з кінематографічним польотом, оскільки зменшує затримку між введенням джойстика та відповіддю квадроцикла.

{kind=link}
Під час налаштування Feed Forward я вважаю за краще робити кілька рухів і переворотів і перевіряти траси гіроскопа/установки. Використовуйте свій звичайний профіль ставок або профіль ставок за замовчуванням у Betaflight (просто перейдіть на невикористаний профіль ставок), щоб отримати пристойну максимальну ставку при повному заряді. Ви можете перевірити мої тарифи тут: https://oscarliang.com/rates/#My-Rates
Замість використання інструменту крокової відповіді в PTB, використовуйте BE для перевірки заданого значення/гіроскопа. Гіроскоп повинен більш точно відстежувати задане значення з меншою затримкою. В ідеалі гіроскоп повинен бути прямо на вершині заданого значення.
Якщо Feed Forward перевищує (гіроскоп рухається раніше встановленого значення), FF занадто високий. У наступній демонстрації 0,5 є занадто низьким, 1,0 все ще недостатньо високим, але 1,5 є трішки забагато та перевищує значення. Я думаю, що Feedforward на 1.3-1.4 повинен зробити це в цьому прикладі.
{kind=link}
Якщо посилення FF занадто високе, це може спричинити реакцію P-члена в протилежному напрямку, намагаючись протидіяти цьому.
{kind=link}
Немає значення, яким є ваш стиль польоту, упередження може бути корисним і не застосовується лише до певних типів польоту. Навіть кінематографічний політ може виграти від достатньої кількості прямої подачі, якщо ви рухаєте палицею плавно та повільно, тоді попередня подача все одно не спрацює. Якщо вам потрібна миттєва відповідь, FF зменшить затримку між введенням джойстика та квадровідповіддю. Якщо вам потрібен плавний політ, просто використовуйте експо, більше згладжування RC або знизите швидкість.
Є додаткове налаштування Feedforward boost (FF Boost). Ви хочете збільшити його, якщо гіроскоп відстає від заданого значення на початку руху, але наздоганяє його пізніше. Але ви повинні зменшити його, якщо гіроскоп випереджає встановлене значення на початку руху, але відстає пізніше.
Налаштування I Gain
Ідеал, який я досягаю, значною мірою базується на відчуттях. Вам не потрібне велике підсилення I, якщо у вас оптимальні прирости P і D; вам достатньо, щоб дрон не дрейфував і не блукав. Якщо ви рухаєтеся вперед із мінімальними натисканнями палиці, дрон має деякий час утримувати своє положення. Якщо є якийсь дрейф, то вам потрібен вищий приріст I.
Термін I у Betaflight має ДІЙСНО ШИРОКЕ вікно налаштування, особливо для потужних 5″ квадроциклів. Як правило, діапазон від 0,5 до 1,5 на повзунку I члена добре працює для 5-дюймових квадроциклів. Це широке вікно дозволяє нам спочатку настроїти все інше, а в останню чергу налаштувати член I. З високим коефіцієнтом підсилення I ваш квадроцикл буде більш точним, але якщо коефіцієнт підсилення I надто високий, у вас можуть виникнути повільні коливання, яких варто уникати.
Я виявив, що інструмент ступінчастої реакції в PTB не є ефективним для визначення члена I, оскільки ступінчаста характеристика для тангажа та крену залишається ідентичною незалежно від значення повзунка I-підсилення (наприклад, від 0,4 до 2,0). Однак ви можете використовувати його для налаштування підсилення Yaw I, яке, як я вважаю, зазвичай становить близько 1 на повзунку для 5-дюймових квадроциклів.
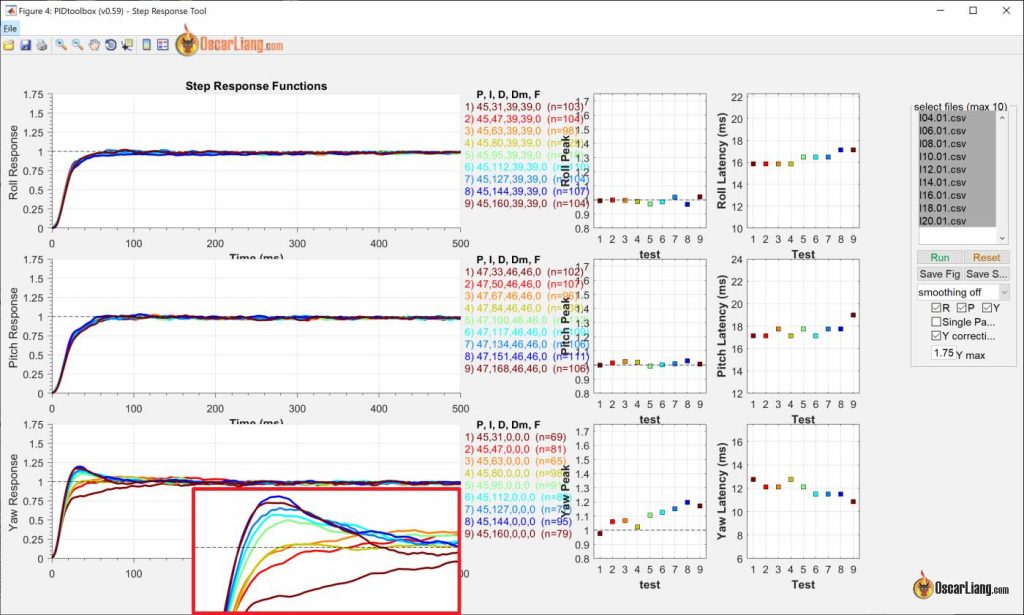
{kind=link}
Ви можете налаштувати посилення I, дивлячись крізь окуляри та слухаючи двигуни. Якщо ви прагнете підвищити I-коригування якомога вище, спробуйте перемістити повзунок I-коригування вгору, доки не помітите повільні відскоки та коливання під час швидких рухів, а потім зменшіть його на одну або дві сходинки. Однак дуже важко змусити наші квадроцикли показувати відскоки завдяки таким функціям, як «I-term relax» у Betaflight. У наш час ви можете використовувати надзвичайно високі показники I без особливого негативного впливу (наприклад, відскоків).
Для 5-дюймових квадроциклів я зазвичай просто залишаю повзунок I gain на 1.
За допомогою I-term relax ви можете налаштувати відсічення залежно від чуйності дрона. Для фрістайл-дронів зазвичай можна залишити налаштування за замовчуванням. Для гоночних безпілотників збільште його до 30. Для більш важких безпілотників, таких як синеліфтери та 7-дюймові безпілотники дальнього радіусу дії з GoPro, встановіть обмеження на 10.
Динамічне демпфування
Динамічне демпфування – це функція, яка максимально підвищує посилення D під час різких рухів, але не збільшує його під час нормального польоту. Це допомагає зменшити тепло двигуна. Проблема в тому, що коли дрон виявляє різкий рух і намагається підвищити посилення D, інколи буває надто пізно, тому це не завжди спрацьовує. Тому я зазвичай залишаю повзунок динамічного демпфування на 0 і залишаю повзунок демпфування без змін, квадроцикл використовуватиме той самий посилення D протягом усього польоту. Але якщо у вас гарячі двигуни під час фрістайлу, варто звернути увагу на Dynamic Damping.
Ось як я зазвичай використовую Dynamic Damping:
- Занотуйте своє поточне значення D Max. Це значення має бути таким самим, як Derivative, оскільки повзунок Dynamic Damping наразі встановлено на 0.
- Почніть зі збільшення повзунка Dynamic Damping до 1.
- Потім зменшуйте повзунок «Демпінг», доки значення D Max не залишиться таким же, як і раніше, це знизить базове посилення D, яке використовується під час звичайних польотів, щоб підтримувати охолодження двигунів. Не хвилюйтеся, якщо вам не вдасться повернути D Max до того, що було раніше, різниця в 1 або 2 бали не повинна бути помітною.
Функція Dynamic Damping також корисна, щоб зробити ваш дрон більш плавним, якщо у вас є вібрація навіть під час простих польотів вперед. Це тому, що вібрацію можна посилити за допомогою D-підсилення, а використання динамічного демпфування може придушити D-підсилення, коли ви просто їдете. Однак це лише пов’язка, вам слід спочатку вирішити механічну проблему.
Інші налаштування
Антигравітаційні прирости
Посилення антигравітації (AG) допомагають зменшити хитання та занурення носа, коли ви штовхаєте, а потім відпускаєте важіль газу. AG тимчасово підвищує приріст I під час дросельних насосів, щоб пом’якшити ці небажані падіння. Однак, якщо коефіцієнт підсилення AG встановлено занадто високо, ваш квадроцикл може відчувати швидкі коливання (заїкання), коли ви відпускаєте педаль газу, оскільки AG збільшує як P, так і I.
За замовчуванням 8, зменшіть його, якщо ви бачите коливання під час швидкої зміни газу. Для 5-дюймових безпілотних літальних апаратів я знайшов хороший діапазон від 8 до 12.
Ви можете налаштувати AG, дивлячись в захисні окуляри, або перевірити наявність занурення носа в журнали Blackbox і побачити ефект антигравітації.

{kind=link}
Динамічний простій
Динамічний режим холостого ходу покращує стабільність, покращує обробку пропів і зменшує ймовірність десинхронізації ESC. Він збільшує швидкість двигуна, коли дросельна заслінка знаходиться на нульовому положенні, покращуючи повноваження керування та чутливість при низьких натисканнях дросельної заслінки. Інші переваги включають різкіші зупинки під час перекидання та перекату, кращу реакцію на низькому газі та ефективніше гальмування.
Коли встановлено Dynamic Idle, Static Motor Idle (у %) на вкладці Motors вимкнуто.
Щоб налаштувати Dynamic Idle, вам потрібно
- Увімкніть двонаправлений DShot на вкладці «Мотор» (якщо у вас уже ввімкнено фільтр RPM, усе готово)
- Введіть відповідне значення Idle RPM на сторінці налаштування PID (наприклад, від 20 до 40 для 5-дюймових дронів).
Рекомендоване значення обертів холостого ходу залежить від розміру та кроку гвинта. Для пропелерів меншого та нижчого кроку зазвичай потрібні вищі значення. Налаштуйте значення вище за вітряних умов, щоб протидіяти нестабільності.
| Розміри реквізиту | Високий реквізит | Низький реквізит |
| 31 мм/1,2 дюйма | 84 | 167 |
| 40 мм/1,6 дюйма | 62 | 124 |
| 2″ | 50 | 100 |
| 2,5″ | 40 | 80 |
| 3″ | 33 | 66 |
| 3,5 дюйма | 28 | 57 |
| 4″ | 25 | 50 |
| 5″ | 20 | 40 |
| 6″ | 16 | 33 |
| 7″ | 14 | 28 |
| 8″ | 12 | 25 |
| 10″ | 10 | 20 |
Міркування щодо динамічного холостого ходу :
- Високе значення : зменшує час зависання, коли дрон перевернутий (мотори штовхають сильніше до землі). Це також може змусити квадроцикл трохи зависати на нульовій дросельній заслінці, ускладнюючи керування дросельною заслінкою.
- Низьке значення : ризик нестабільності низької дросельної заслінки.
Встановлення ідеального значення :
- Визначте значення простою ESC : за замовчуванням зазвичай 5,5%. Перевірте свій двигун у вкладці двигуна, використовуючи димову пробку або стендовий джерело живлення, щоб обмежити струм.
- Перевірте кількість обертів на хвилину : обертайте двигун на значенні холостого ходу ESC (наприклад, 5,5%, повзунок приблизно на 1055) і запам’ятайте зареєстровані оберти на хвилину (потрібна двонаправлена DShot).
- Встановити динамічний холостий : використовуйте значення RPM, поділене на 100, як ідеальне значення динамічного холостого ходу.
Дроссельна заслінка
Throttle Boost збільшує значення дросельної заслінки, коли ви швидко переміщуєте важіль газу вгору, що дає вам додаткову потужність. Це може зробити відгуки на газ більш динамічними, але також може зробити їх непередбачуваними.
- Значення за замовчуванням 5 зазвичай добре працює
- Поради щодо налаштування:
- Якщо вам важко точно керувати дроселем, зменшіть значення.
- Деякі гонщики навіть повністю вимикають Throttle Boost, встановлюючи його на 0, щоб отримати найбільш передбачувану реакцію на дросель.
- Експериментуйте з різними значеннями, щоб побачити, що найкраще підходить для вашого стилю польоту.
Компенсація падіння напруги
Ця функція зменшує максимальне значення двигуна, коли батарея повна, і збільшує її, коли напруга батареї падає. Це забезпечує стабільніші характеристики польоту протягом усього польоту. Але будьте обережні, це може змусити вас забути, коли приземлятися, тому що квадроцикл буде відчувати себе схожим у всій упаковці.
Лінеаризація тяги
- Рекомендоване налаштування : увімкнути лінеаризацію тяги на 20%.
- Переваги :
- Підсилює PID для покращення чуйності та контролю на низькій дросельній заслінці.
- Знижує PID на високому газі, щоб зменшити коливання (подібно до TPA).
- Допомагає при зануренні в носі та особливо корисний для вигуків і дронів, які використовують частоту ШІМ 48 кГц на ESC.
Примітка : оскільки він підвищує PID при низькій дросельній заслінці, вам може знадобитися опустити головний повзунок множника, якщо двигуни нагріваються.
TPA
TPA означає Throttle PID Attenuation.
Щоб точно налаштувати TPA, виконайте розгортку дросельної заслінки та перевірте частоту та теплову карту дросельної заслінки. Якщо ви отримуєте коливання вище певного рівня газу, у цьому випадку TPA може допомогти.
В останньому Betaflight він лише послаблює посилення D вище певного рівня дросельної заслінки (що зазвичай є причиною коливань). У старішій версії Betaflight він послаблює як P, так і D, якщо хочете, ви можете повернути це, ввівши в CLI: set tpa_mode = PD.
Зазвичай я вважаю за краще встановлювати значення дроселя в TPA якомога вищим, щоб посилення D було більш постійним у ширшому діапазоні дроселя. Переконайтеся, що значення дросельної заслінки встановлено трохи нижче, ніж положення, де починають з’являтися коливання, пов’язані з членом D. Наприклад, якщо коливання починається близько 1800 дроселя, я б зробив щось подібне: TPA = 0,75, 1750.
I Термін Ротація та абсолютний контроль
Ці функції зазвичай не потрібні для безпілотних літальних апаратів FPV і більш корисні для пілотів прямої видимості.
Тюнінг Yaw
Погони загалом не потребують особливого налаштування, оскільки посилення за замовчуванням працює добре. Вікно налаштування Yaw досить широке. На відміну від тангажу та крену, які базуються на тязі, створюваній гвинтами, курсування базується на інерції, створюваній обертанням гвинта. Таким чином, поворот буде надто повільним, щоб перевищити встановлене значення, і немає необхідності налаштовувати PID повороту.
Погони також надто повільно, щоб терміни D мали якийсь значущий ефект, і зазвичай це не потрібно. Однак ви можете ввімкнути його, якщо хочете, але це може створювати більше проблем, ніж вирішувати, як-от вібрації тощо. Отже, ми залишилися з термінами P та I для Yaw.
Ви можете налаштувати Yaw за допомогою аналізу крокової відповіді, як ми робили з Pitch and Roll. Крім того, якщо в задній частині графіка відбуваються повільні коливання, то I-Term занадто високий. Якщо виникають швидкі коливання, P-Term занадто високий.
Якщо під час накачування дросельної заслінки у вас виникають тряски, ви можете відокремити поворот від налаштування повзунка та встановити PID повороту окремо. Для цього перейдіть на вкладку PID tuning, у спадному списку «Slider Mode» виберіть RP (Roll Pitch), замість RPY (Roll Pitch Yaw). Це виключить значення повороту з повзунків і дозволить вам ввести номери PID для повороту. Для 5-дюймових фрістайлів і кінематографічних збірок спробуйте 100 як для P, так і для I було б хорошою відправною точкою. Ви також можете спробувати вищі значення, оскільки поворот повільно реагує.
Не існує ідеальної мелодії
Наскільки добре – достатньо добре? Ви завжди можете витратити більше часу на гру з фільтрами та числами PID, і ви можете побачити покращення, але це може бути ситуаційним і час, який ви вкладаєте в це, може бути не пропорційним результату. Зазвичай я просто зупиняюся, коли це виглядає «досить добре», і залишаю це там, якщо немає конкретної проблеми, яку потрібно вирішити
Поради щодо усунення несправностей
Несправний гіроскоп
5-дюймовий FPV дрон повинен літати плавно за стандартними налаштуваннями Betaflight. Якщо ваш квадроцикл відчуває вібрацію, це може бути через механічні чи електричні проблеми, або іноді через поганий гіроскоп на контролері польоту (FC). Ось як діагностувати несправний гіроскоп:
- Симптом : одна вісь значно шумніша за інші, особливо в нижньому частотному спектрі нижче 200 Гц.
- Діагноз : Поверніть FC на 90 градусів. Якщо шумна вісь слідує за обертанням, гіроскоп може бути несправним.
У наведеному нижче прикладі вісь тангажу набагато шумніша, ніж крен і поворот, зі спалахами шуму D-терму, викликаного шумним гіроскопом. Потенційні причини:
- Дроти високої потужності біля гіроскопа.
- Шумне живлення ПЧ.
- Поганий дизайн плати.

Рішення :
- Видалення будь-яких потужних проводів поблизу гіроскопа.
- Ви можете спробувати використати конденсатор з низьким ESR ємністю 1000 мкФ на потужності ESC .
- Якщо ви вже використовуєте конденсатор, спробуйте припаяти додатковий менший конденсатор 220 мкФ-470 мкФ до живлення FC (колодка VBAT/VCC).
- Якщо жодна з наведених вище пропозицій не працює, можливо, вам доведеться просто замінити FC.
RC згладжування
Згладжування RC має важливе значення в Betaflight, щоб уникнути проблем із прямою передачею. Належні параметри згладжування RC залежать від вашого RC посилання. Найкраще завантажити відповідний пресет RC_Link, щоб уникнути помилок.
Auto Factor, мабуть, одне з найважливіших значень, нижче значення означає більшу поривчастість і чутливість, тоді як вище значення є м’якшим і плавнішим, але повільнішим. Ось загальне правило, якого я особисто дотримуюся:
- 20-25 : Гонки
- 30 : значення за замовчуванням, чудове для Freestyle
- 50 : Кінематографічний
- 90 : Надзвичайно плавний круїз, затримка може бути помітною для деяких
- 120 : Максимально можлива плавність без проблем, але затримка помітна
Погане спорядження/пілот також потребує вищого згладжування RC, наприклад, низькоякісне обладнання радіокерування, зношені підвіси, пілоти з тремтячими пальцями тощо. В основному все, що може сприяти ривкам у командах RC.
Якщо можливо, перевірте журнали чорного ящика, щоб підтвердити, що у вас є плавні задані значення; якщо задане значення не плавне (має кроки від команд RC), просто трохи збільште згладжування.
Якщо у вас є шум у встановленому значенні, який досягає піків близько 50 Гц, 150 Гц, 250 Гц або 500 Гц, то, ймовірно, є проблема з RC згладжуванням. Ці частоти є звичайними пакетними швидкостями в каналі RC. У цьому прикладі це Crossfire 150 Гц.
Якщо ви недостатньо використовуєте фільтрацію для команд RC, можливо, ви недостатньо згладили сигнал RC, і він може створювати шум на частоті вашої швидкості пакетів радіолінії.
RC-згладжування усуває кроки та нерівності у вашому заданому значенні, це робить трасування члена P менш ривчастим. Однак це також додає затримку для прямого зв’язку, а також до встановленого значення, тому ваш квадроцикл може відчувати себе дещо менш чуйним. Згладжування RC є корисним, але надмірне згладжування перешкоджає досягненню високої швидкості пакетів RC, як це пропонує ExpressLRS.
Мета полягає в тому, щоб згладити кроки, але не додавати занадто багато затримки. Якщо вам потрібен більш плавний вхід RC, спробуйте додати ще експо, це має подібний ефект, але не дасть вам штрафу за затримку.
Найкращий спосіб — просто завантажити відповідний пресет RC Link, про який я говорив тут . Якщо вам не вдалося завантажити правильний попередній набір RC_Link для вашого конкретного каналу RC і швидкості пакетів, це також може спричинити проблеми з Feedforward. У цьому прикладі тремтіння прямого зв’язку через відсутність покрокового згладжування в командах RC.

PID Сума занизька?
Якщо PID_Sum досягає ліміту за замовчуванням у 500 (50%), оскільки налаштування PID дуже високі, ви можете збільшити ліміт до 1000. Для цього введіть таку команду в CLI: set pid_sum_limit=1000. Але це не завжди впливає на поведінку в польоті, оскільки двигуни все одно можуть насититися з такою швидкістю.
Тремтіння фільтра АЦП викликають коливання
Якщо ви відчуваєте випадкові вібрації та коливання через тремтіння прямого зв’язку, навіть після застосування правильного попереднього налаштування RC Link або збільшення RC згладжування, проблема може бути пов’язана з фільтром АЦП.
Переконайтеся, що фільтр АЦП вимкнено в системному меню вашого радіо на сторінці обладнання.
Під час увімкнення фільтра АЦП у журналах Blackbox з’являються стрибки прямого зв’язку, що спричиняє небажані коливання та вібрації.
